
ROBOTICS

Understanding Battery Types for Robotics: NiMH, LiPo, and Beyond
Compare NiMH, LiPo, Li-ion, and other battery types for robotics. Learn voltage, capacity, C-ratings, safety,…

Cable Management in Robotics: Preventing Tangles and Breaks
Master cable management in robotics—learn routing, strain relief, connector selection, and wire labeling techniques to…
Why Robot Chassis Design Matters More Than You Think
Learn why robot chassis design is critical—explore stability, center of gravity, weight distribution, serviceability, and…

Understanding Gear Ratios: Trading Speed for Torque
Master gear ratios for robotics—learn how to calculate speed, torque, and efficiency for spur gears,…
How to Choose the Right Wheels for Your Robot
Learn how to choose robot wheels by diameter, material, tread, and type – from standard…

Structural Materials Compared: Plastic, Wood, Aluminum, or 3D Printed Parts?
Compare plastic, wood, aluminum, and 3D printed materials for robot construction. Learn strength, weight, cost,…
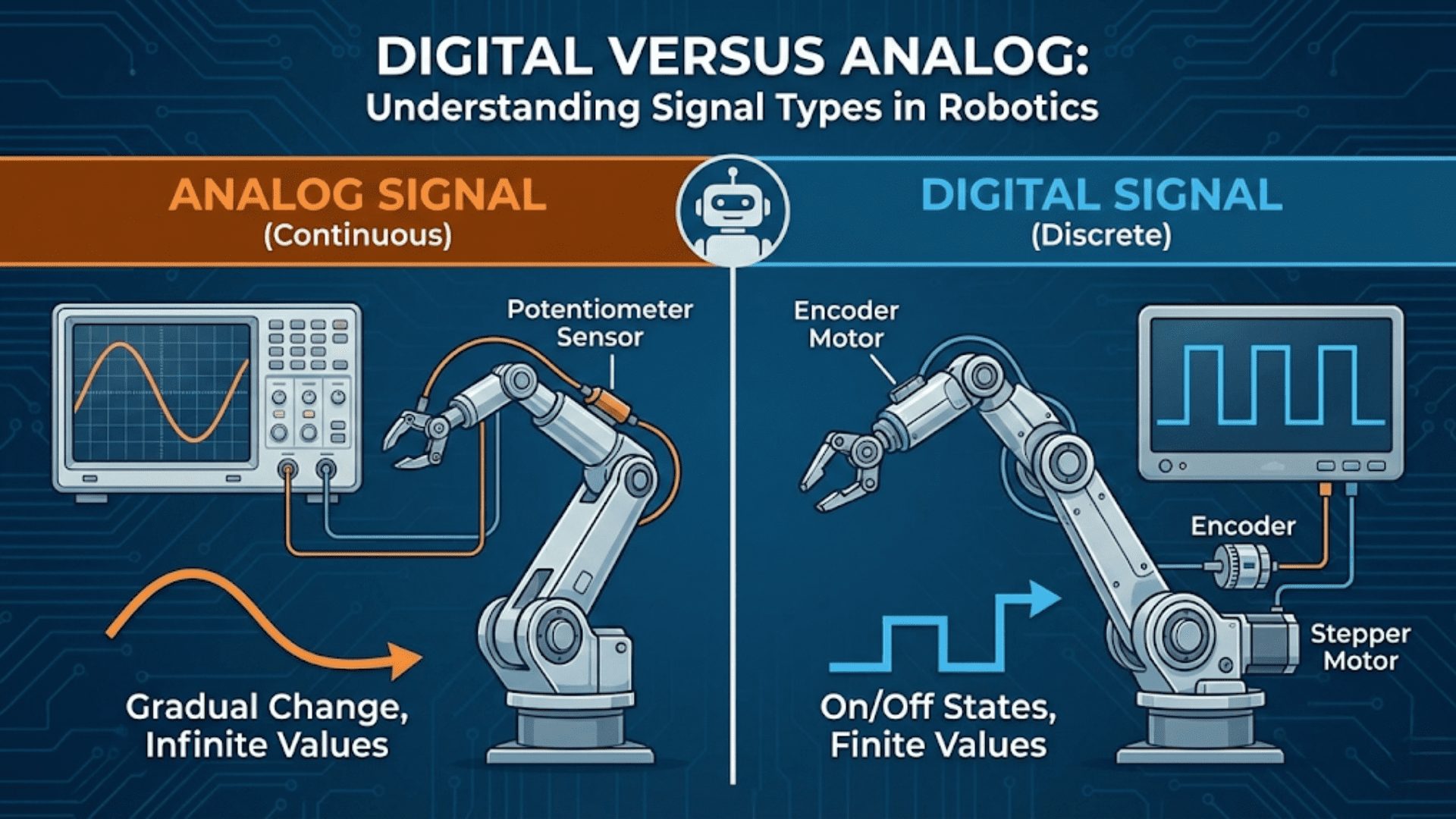
Digital Versus Analog: Understanding Signal Types in Robotics
Understand digital vs analog signals in robotics. Learn how each type works, when to use…
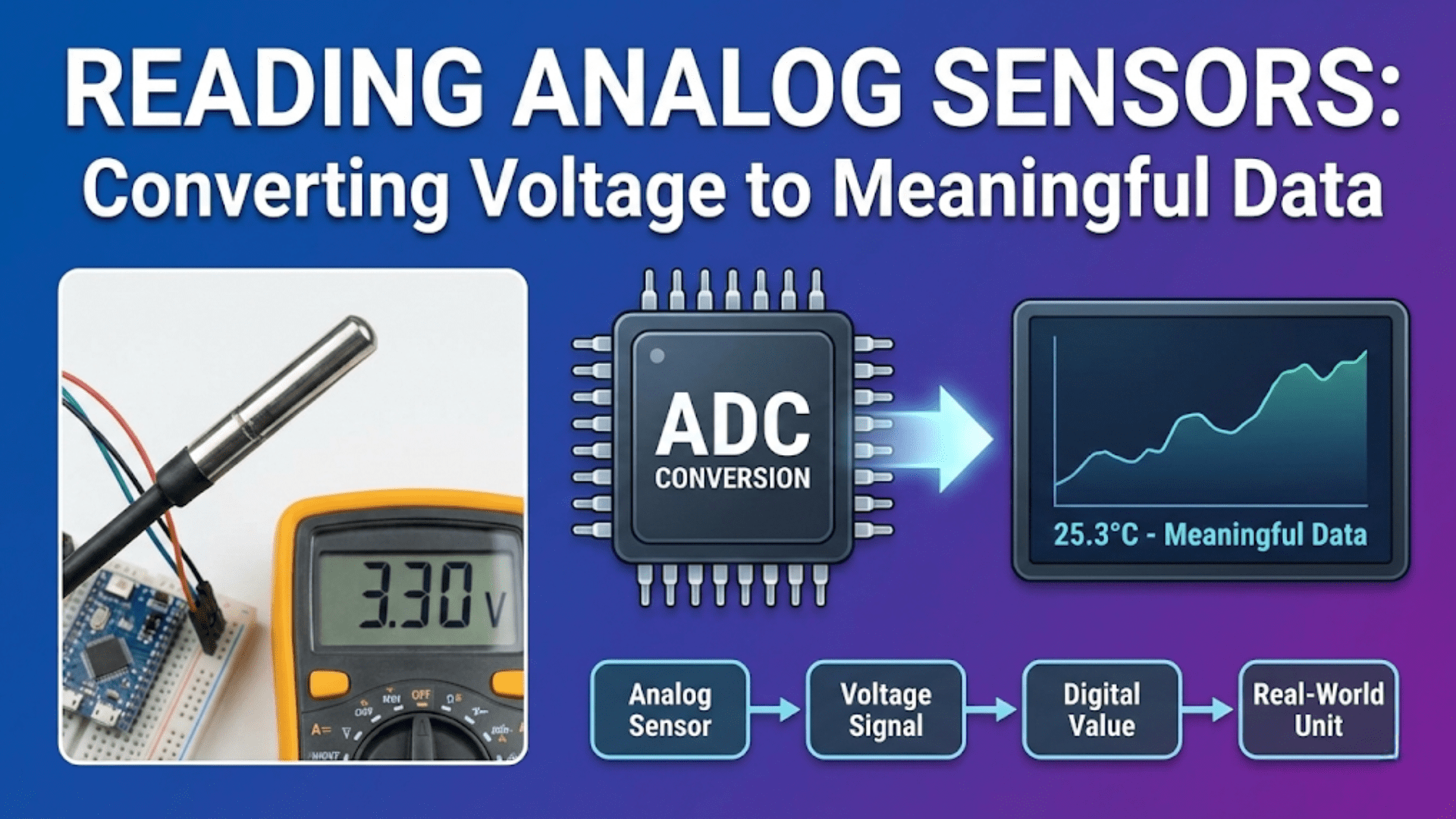
Reading Analog Sensors: Converting Voltage to Meaningful Data
Learn how to read analog sensors in robotics—convert raw ADC values to real-world units, apply…

What Is a PID Controller and Why Is It Everywhere in Robotics?
Understand PID controllers in robotics—how proportional, integral, and derivative terms work together to create precise,…

Understanding the Difference Between Open-Loop and Closed-Loop Control
Learn the key differences between open-loop and closed-loop control in robotics. Discover how feedback transforms…
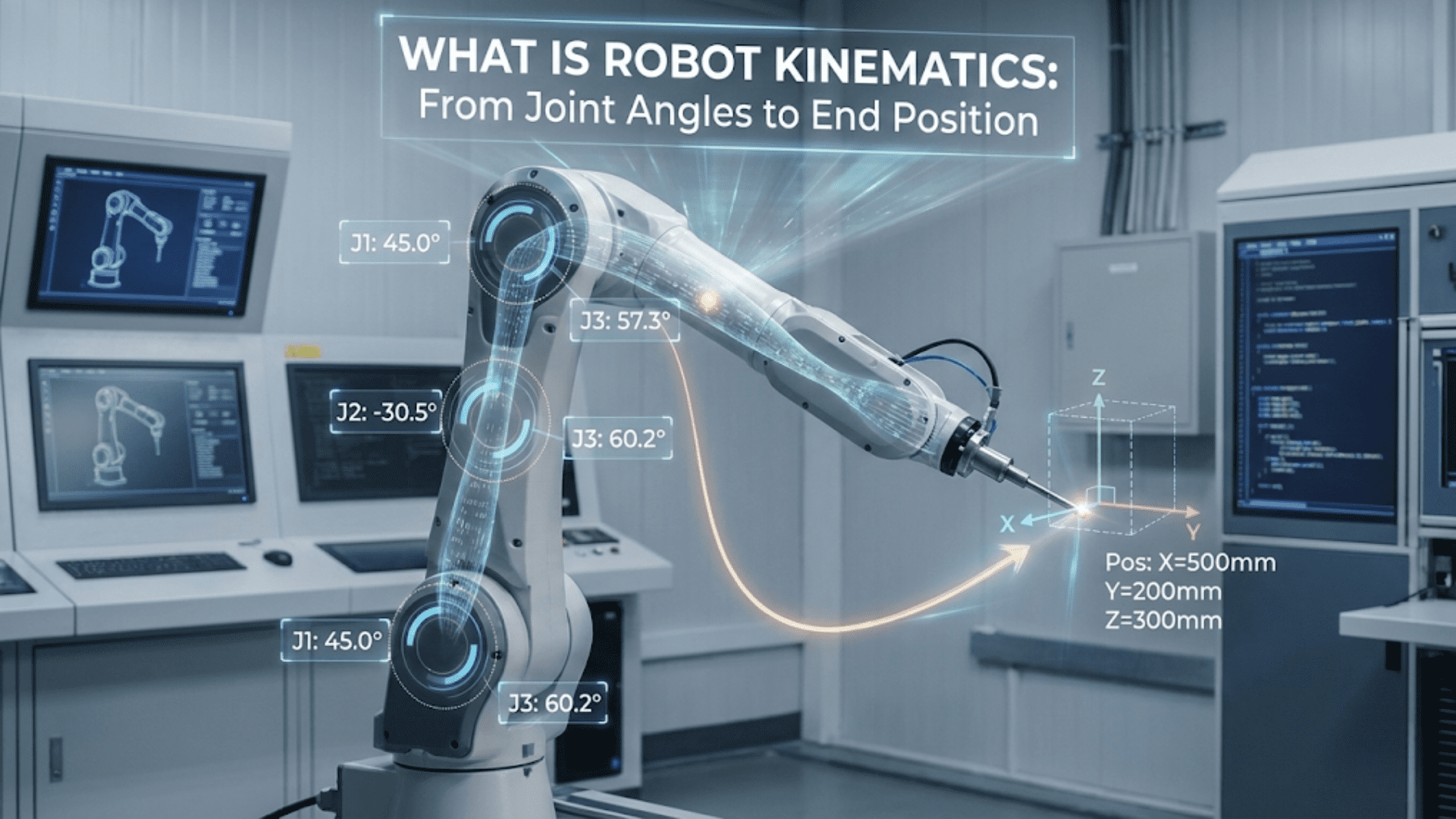
What Is Robot Kinematics: From Joint Angles to End Position
Understand robot kinematics from scratch. Learn forward and inverse kinematics, trigonometry for robot arms, workspace…
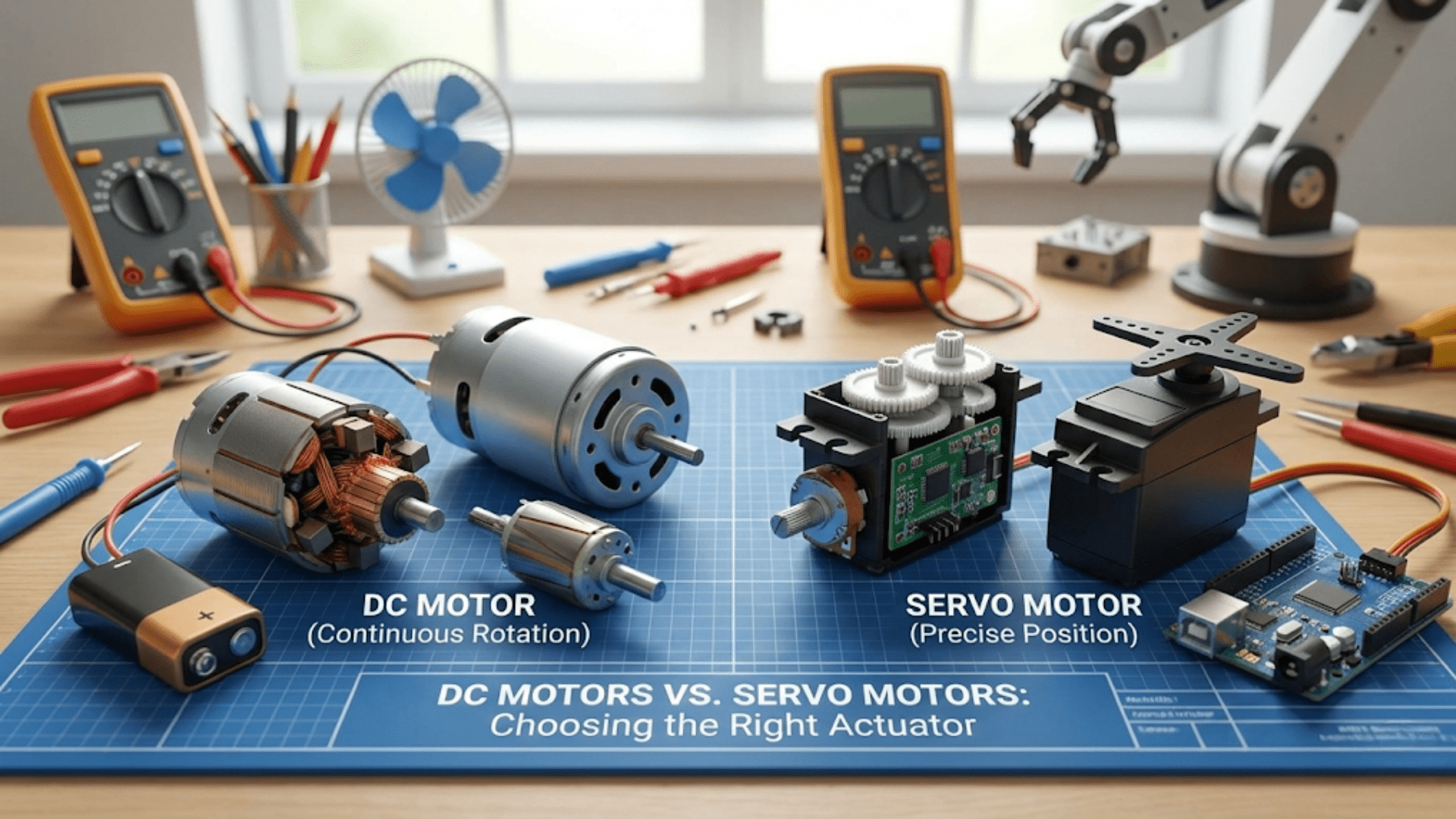
DC Motors Versus Servo Motors: Choosing the Right Actuator
DC motor vs servo motor: learn the key differences, strengths, and weaknesses of each. Use…
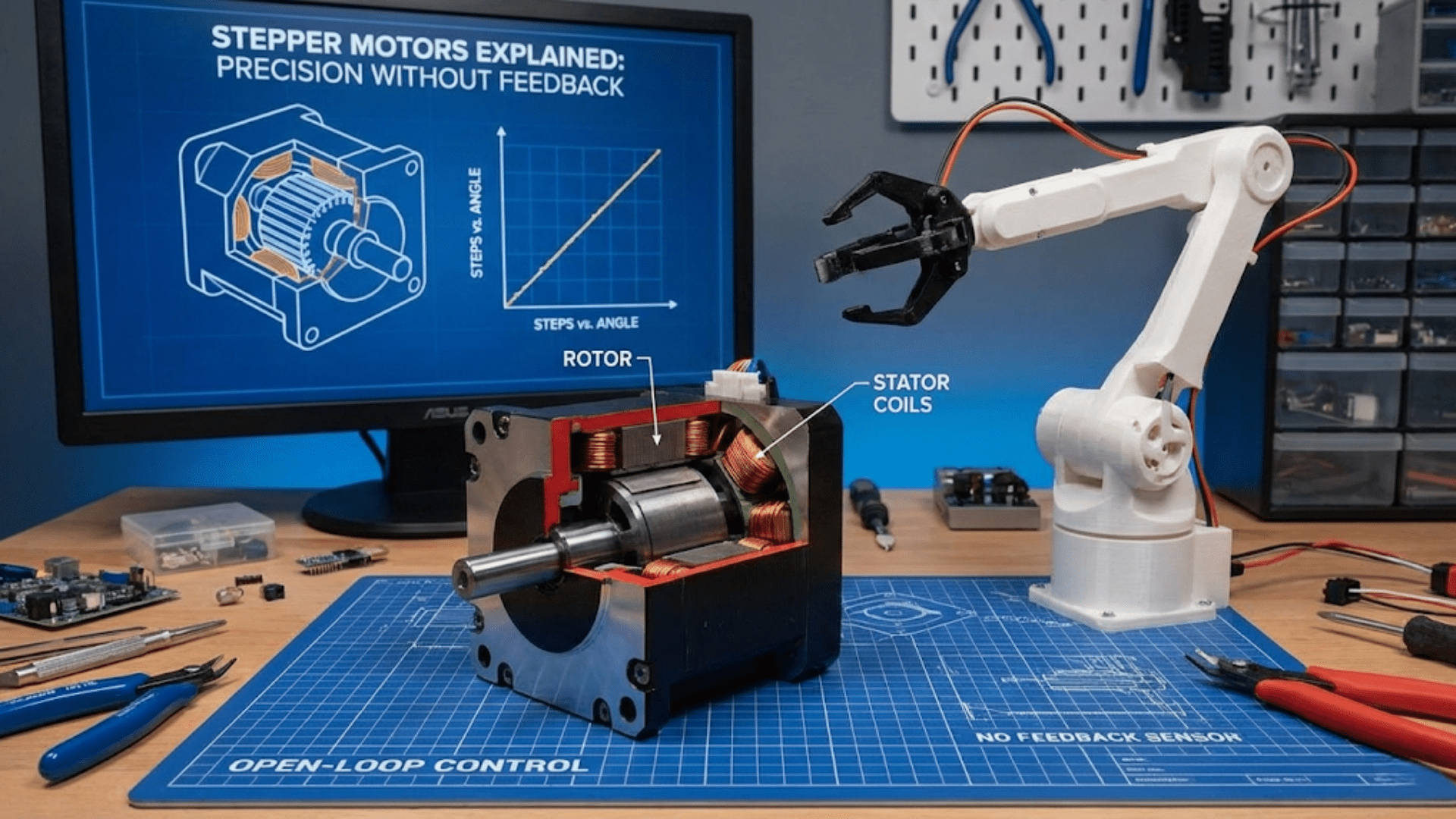
Stepper Motors Explained: Precision Without Feedback
Master stepper motors for precise robot positioning. Learn step modes, A4988, DRV8825 wiring, AccelStepper library,…
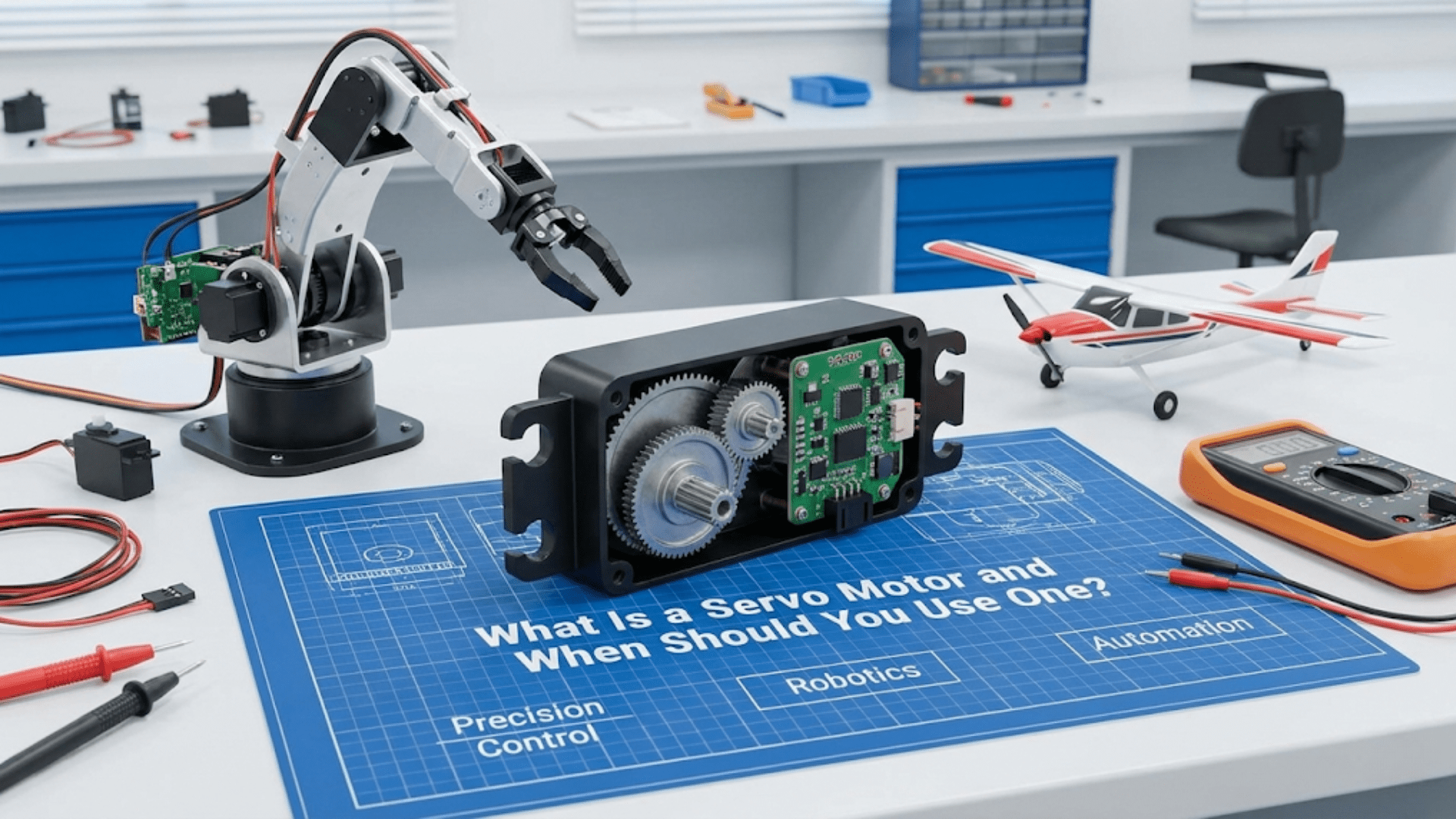
What Is a Servo Motor and When Should You Use One?
Learn what servo motors are, how they work, and when to use them in robotics.…
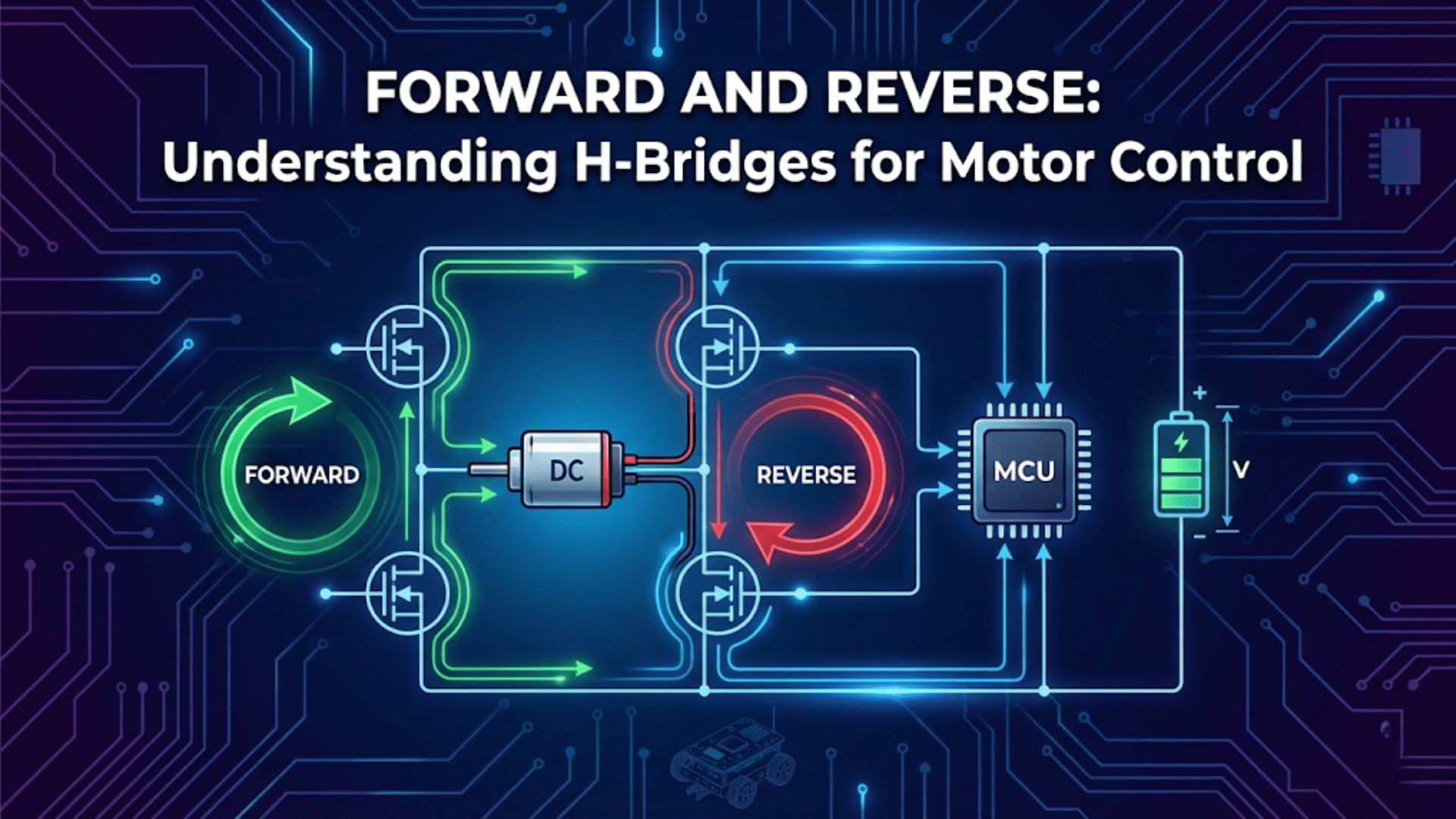
Forward and Reverse: Understanding H-Bridges for Motor Control
Master H-bridge motor control for bidirectional movement. Learn circuit operation, L298N, L293D, TB6612, PWM integration,…
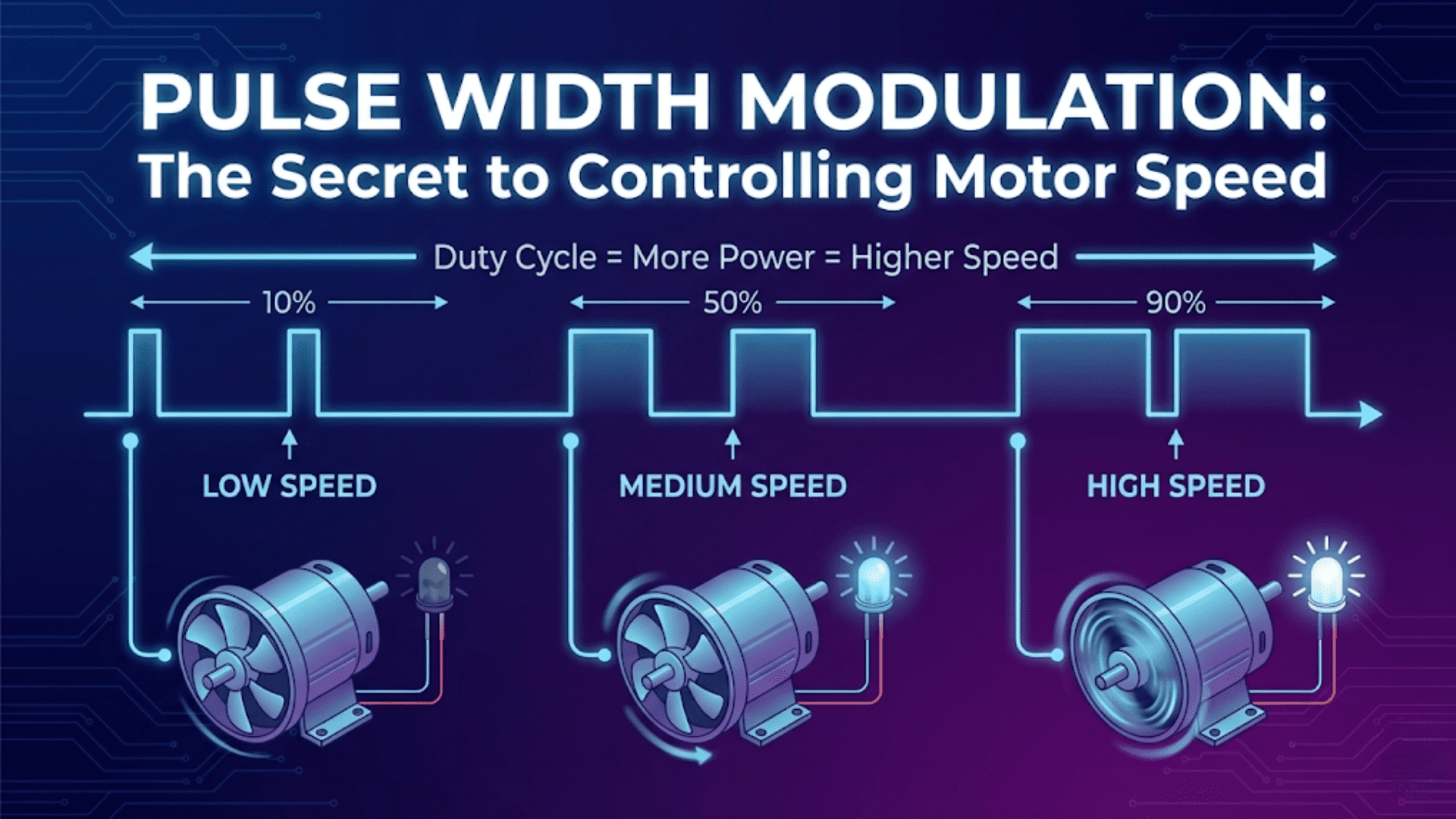
Pulse Width Modulation: The Secret to Controlling Motor Speed
Master PWM for robot motor speed control. Learn duty cycle, frequency, analogWrite, servo control, and…
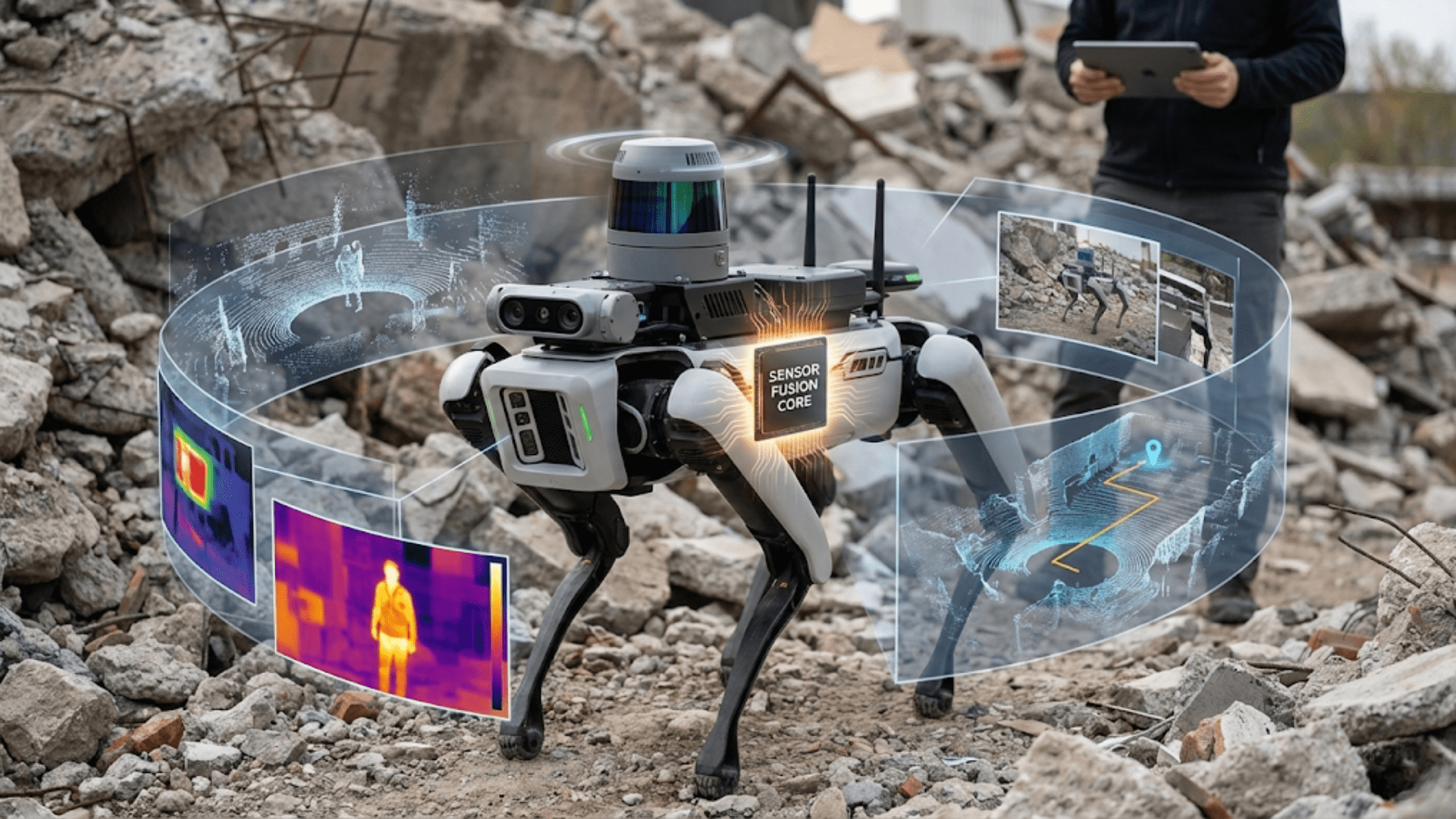
Why Do Robots Need Multiple Sensors? The Principle of Sensor Fusion
Discover why sensor fusion makes robots smarter and more reliable. Learn complementary filtering, weighted averaging,…
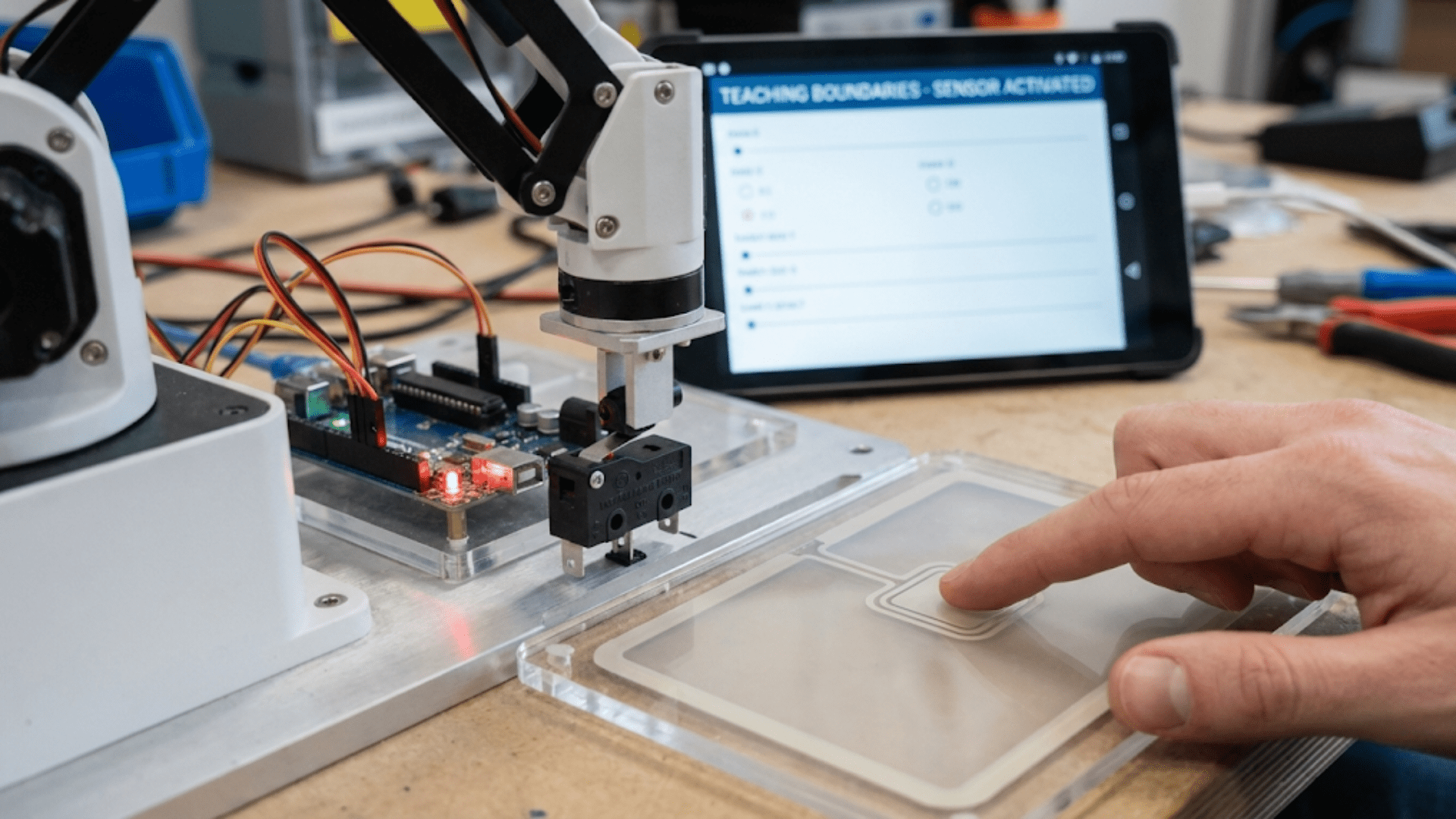
Touch Sensors and Limit Switches: Teaching Robots About Boundaries
Master touch sensors and limit switches in robotics. Learn contact detection, debouncing, safe homing routines,…
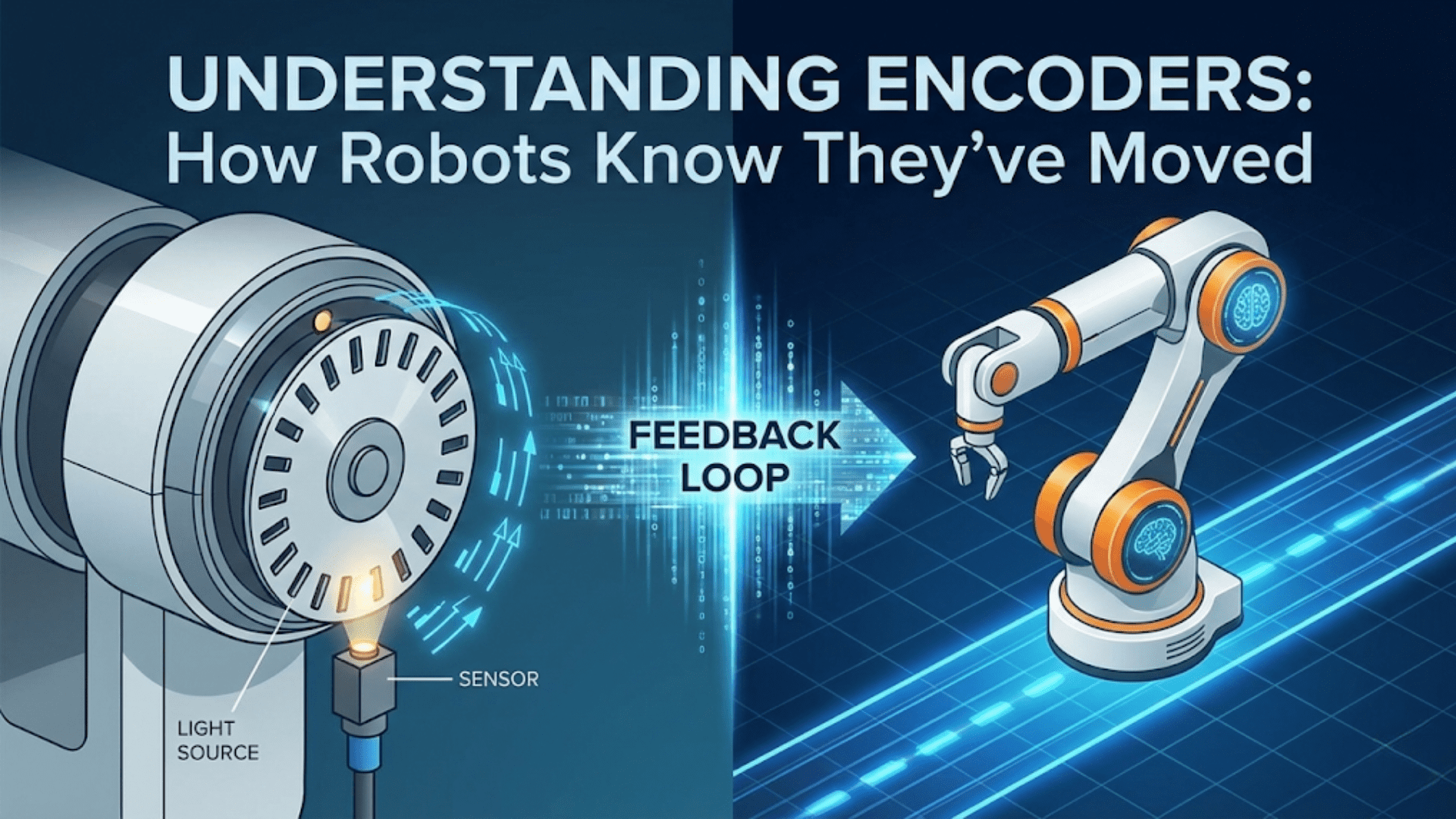
Understanding Encoders: How Robots Know They’ve Moved
Learn how encoders give robots precise motion feedback. Master quadrature encoders, odometry, speed control, and…
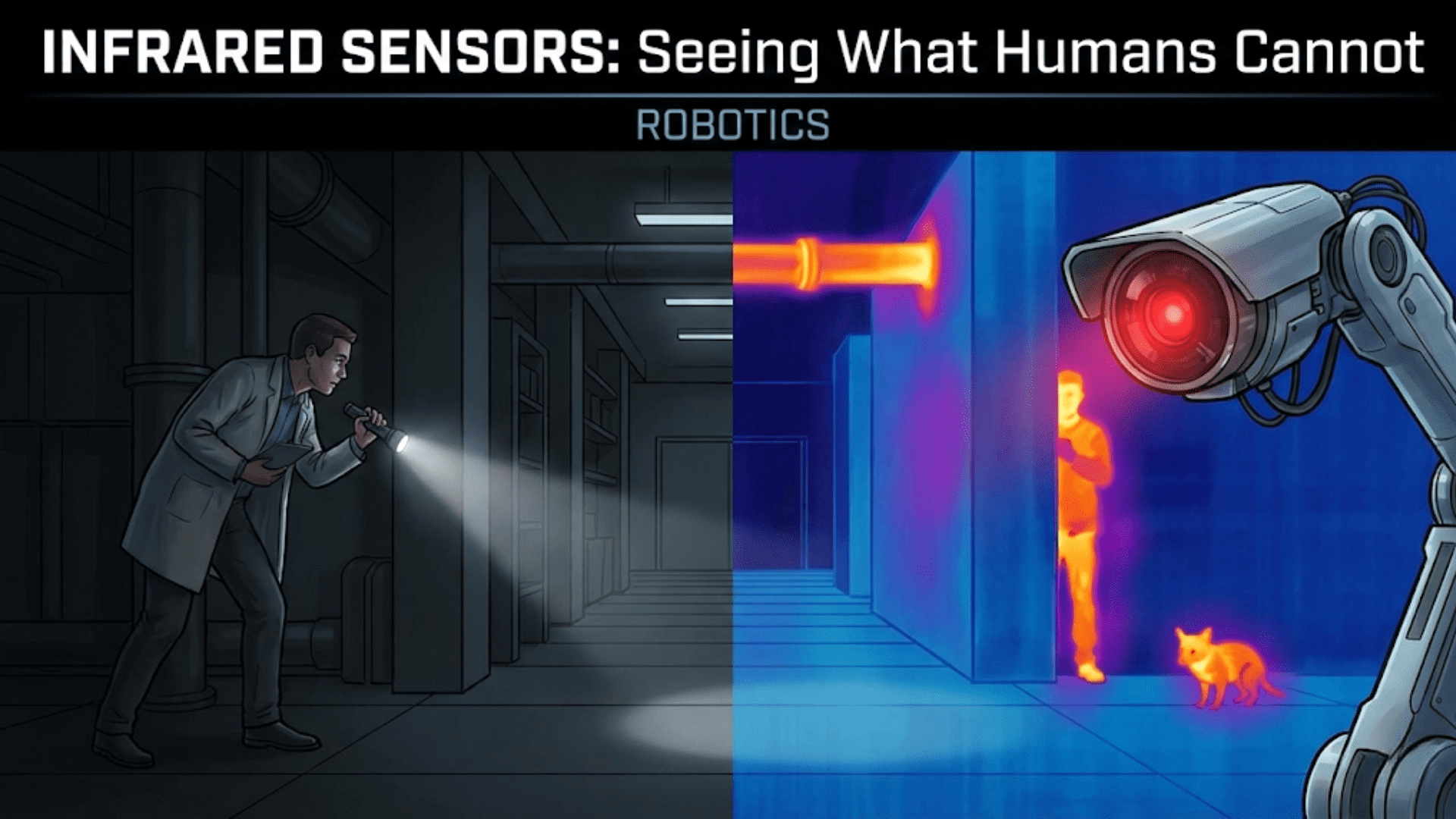
Infrared Sensors: Seeing What Humans Cannot
Master infrared sensors in robotics. Learn IR proximity detection, line sensing, remote control, and complete…
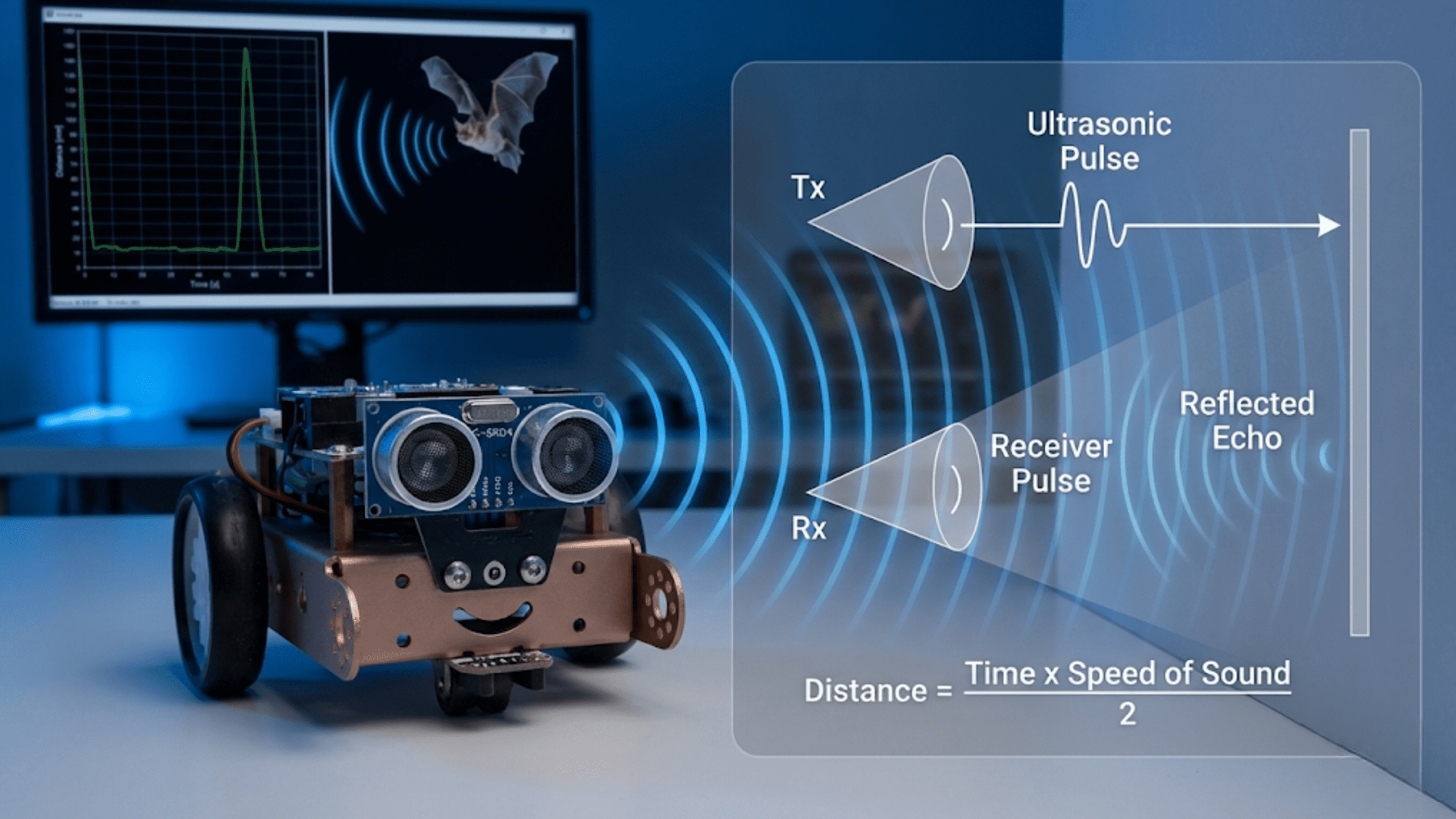
How Ultrasonic Sensors Work: Robot Echolocation Explained
Learn how ultrasonic sensors measure distance in robotics. Complete guide to HC-SR04, wiring, code examples,…
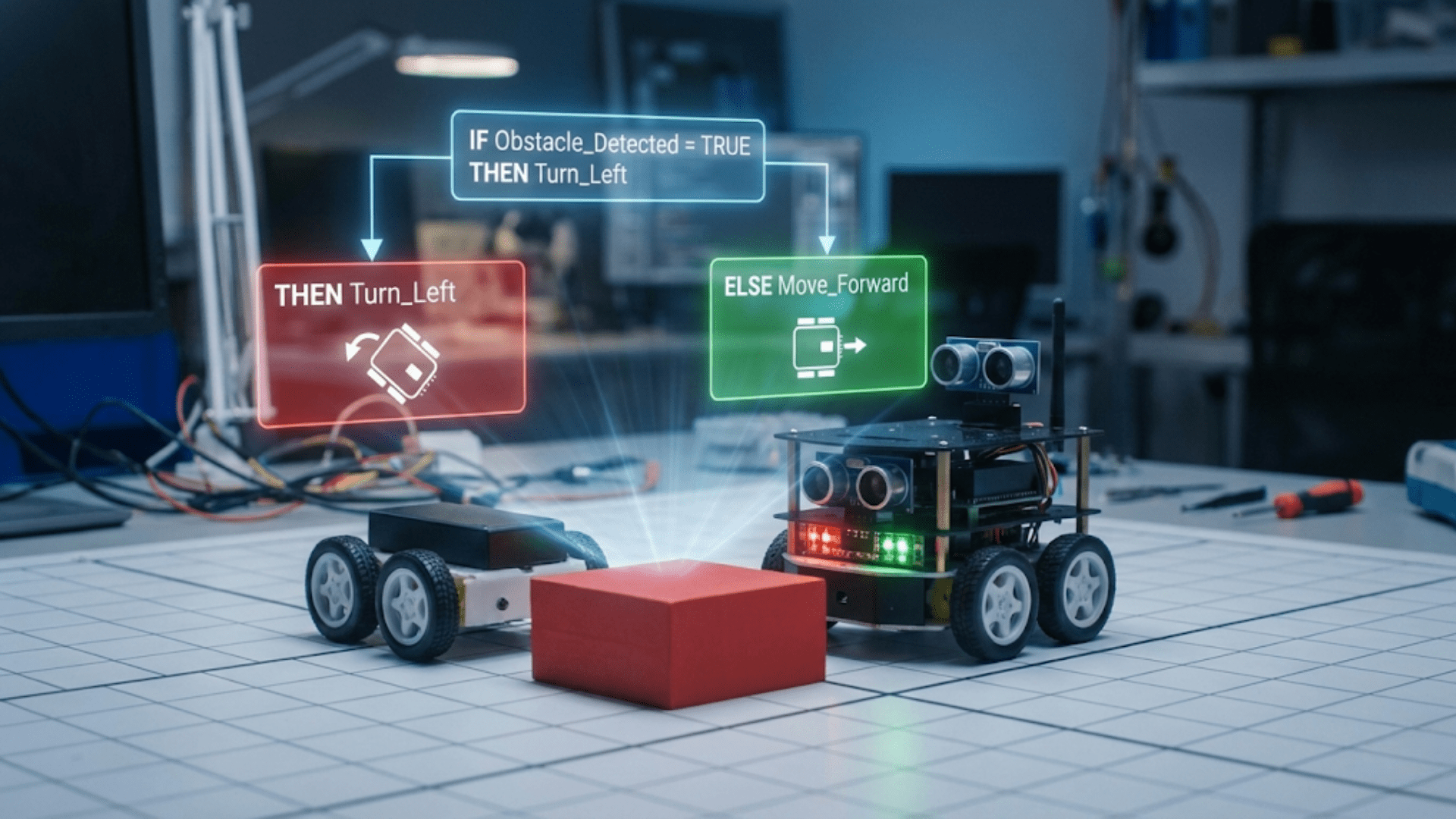
Making Decisions: If-Then Logic in Robot Behavior
Master if-then logic for autonomous robots. Learn conditional statements, decision trees, boolean operators, and intelligent…
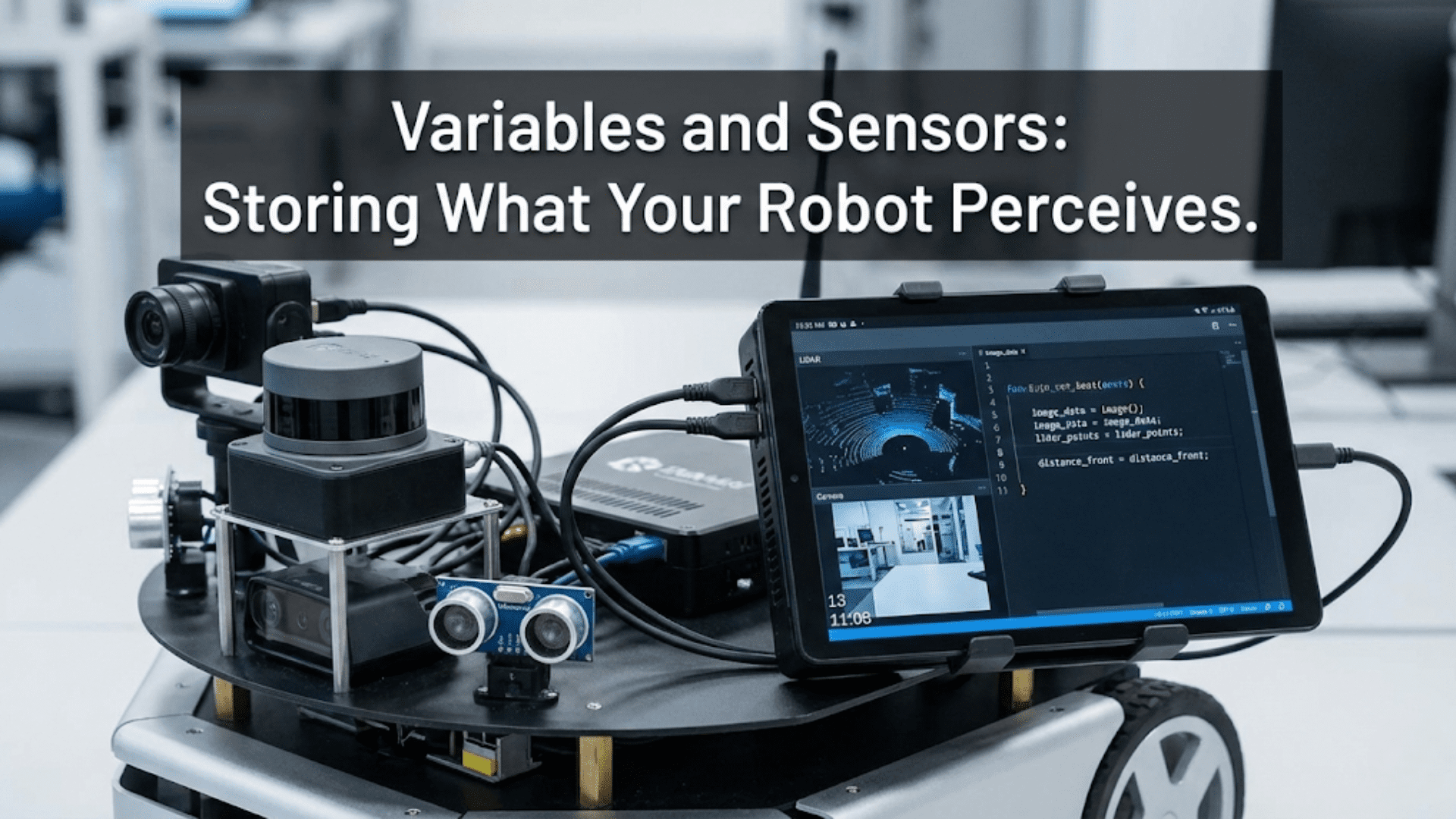
Variables and Sensors: Storing What Your Robot Perceives
Learn how variables store sensor data in robotics. Master data types, sensor reading, value storage,…
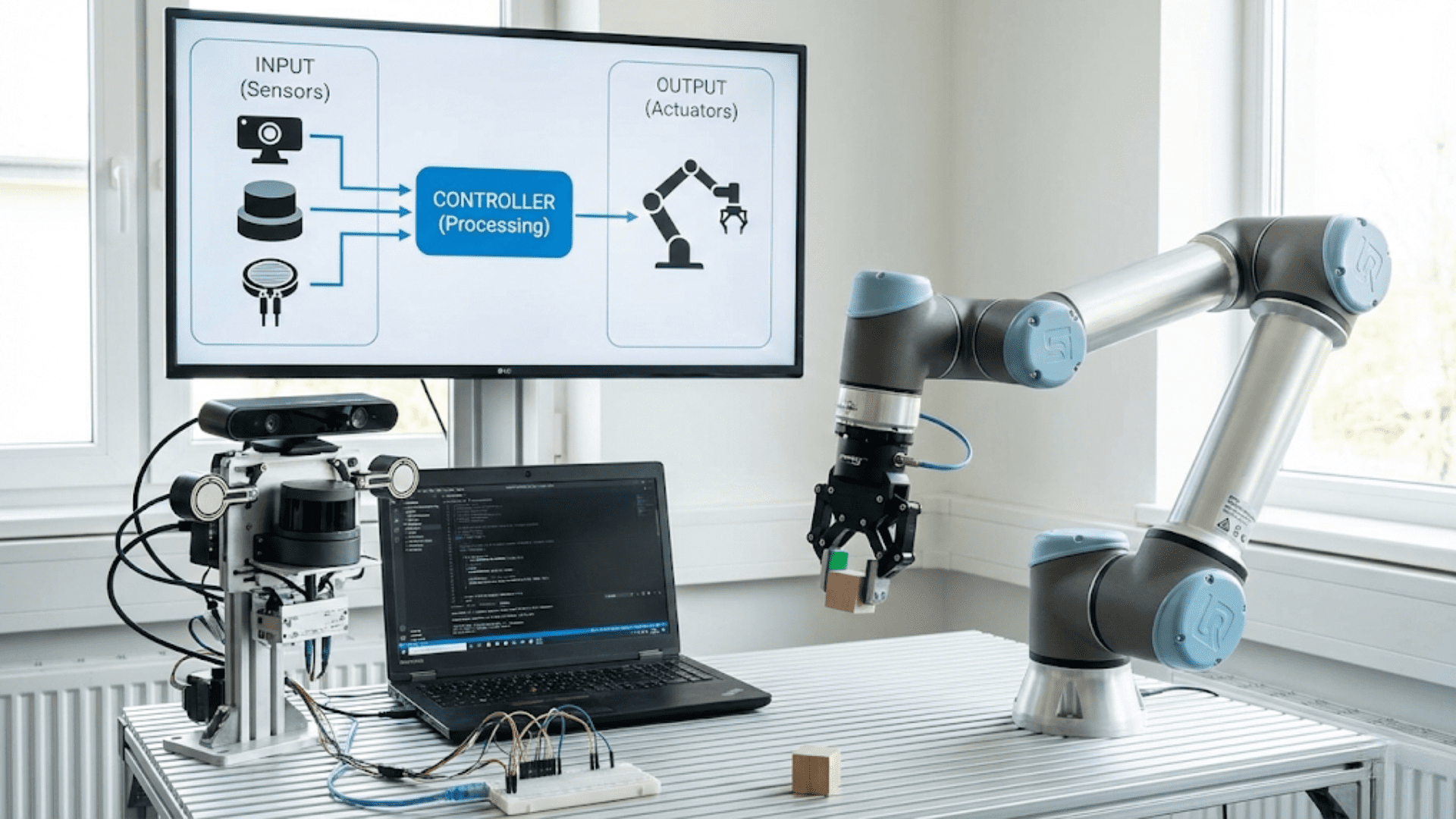
Understanding Input and Output in Robotics Programming
Master digital and analog I/O in robotics. Learn to read sensors, control actuators, and connect…
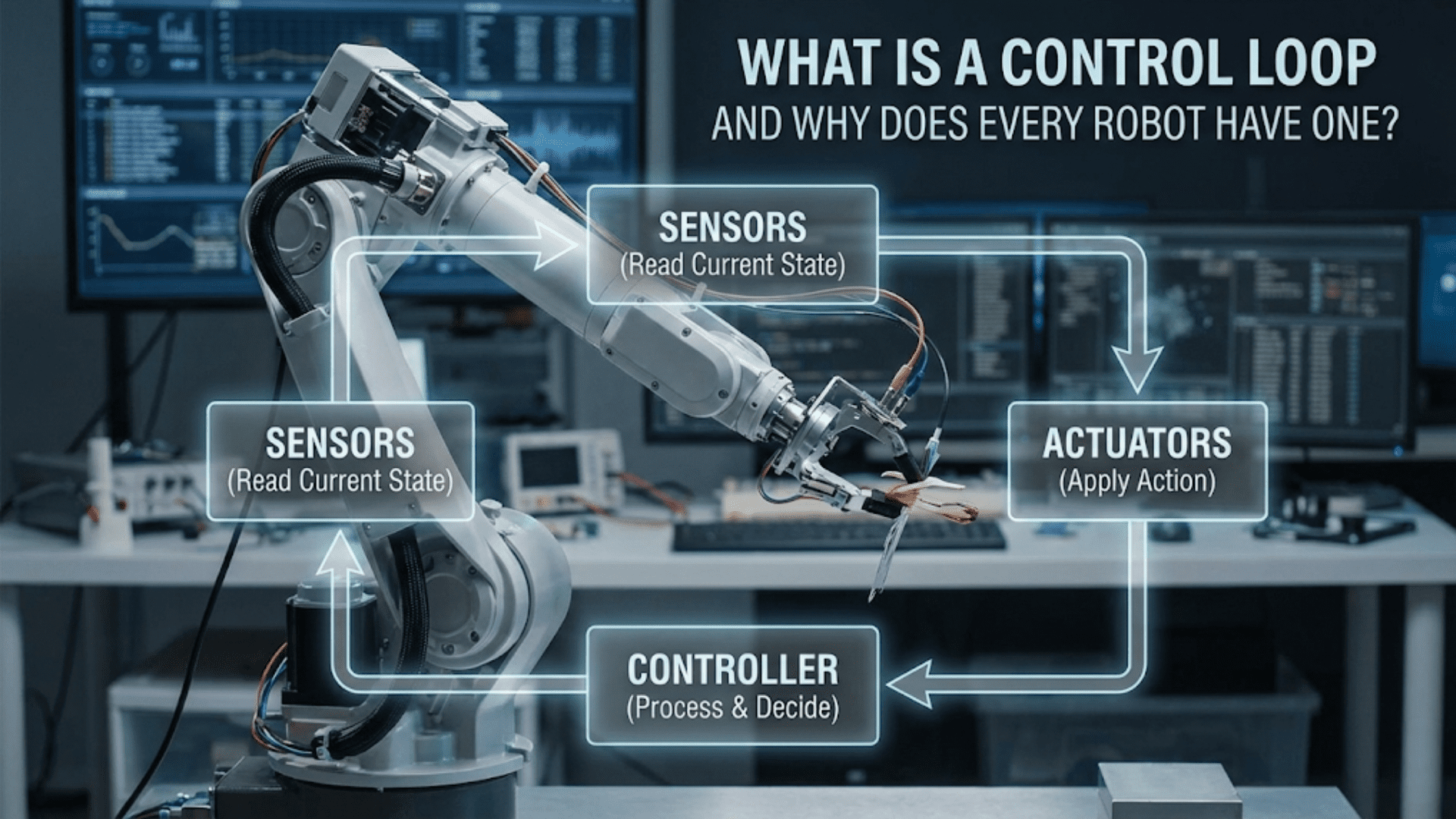
What Is a Control Loop and Why Does Every Robot Have One?
Discover why control loops are essential in robotics. Learn open-loop vs closed-loop systems, PID control,…
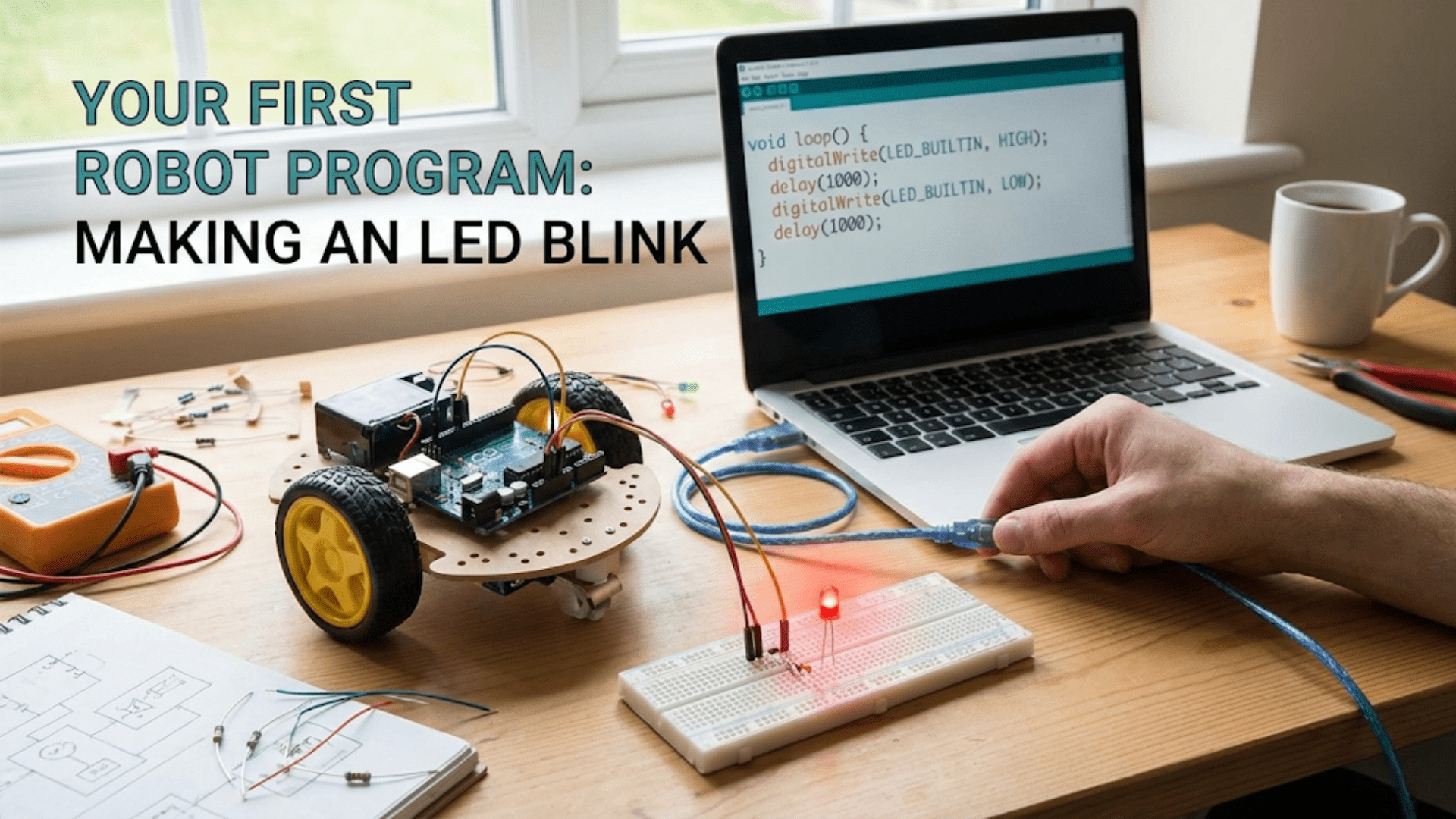
Your First Robot Program: Making an LED Blink
Learn to write your first robot program by making an LED blink. Complete Arduino tutorial…
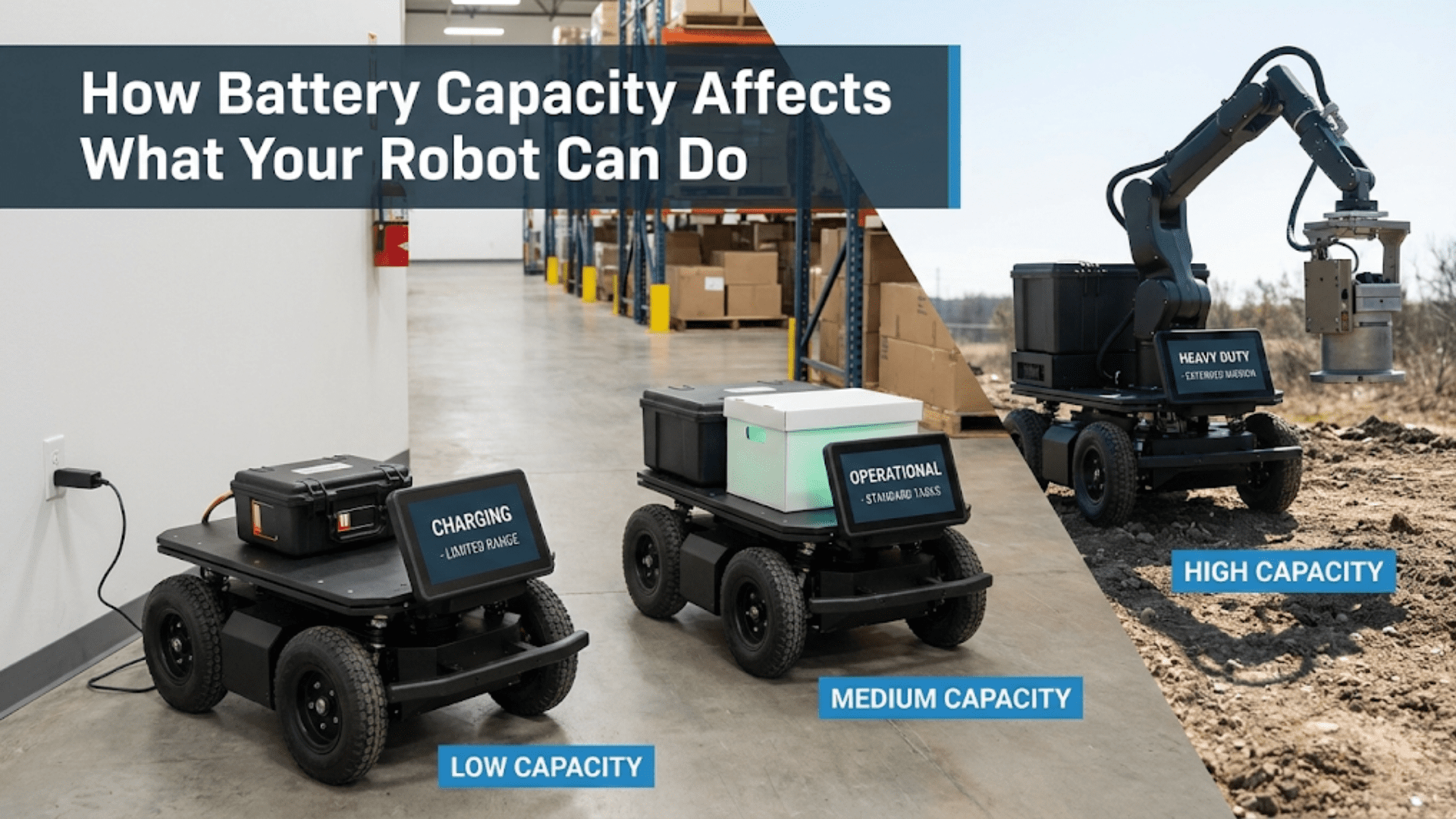
How Battery Capacity Affects What Your Robot Can Do
Learn how battery capacity determines robot runtime, speed, and capabilities. Master amp-hour ratings, voltage selection,…
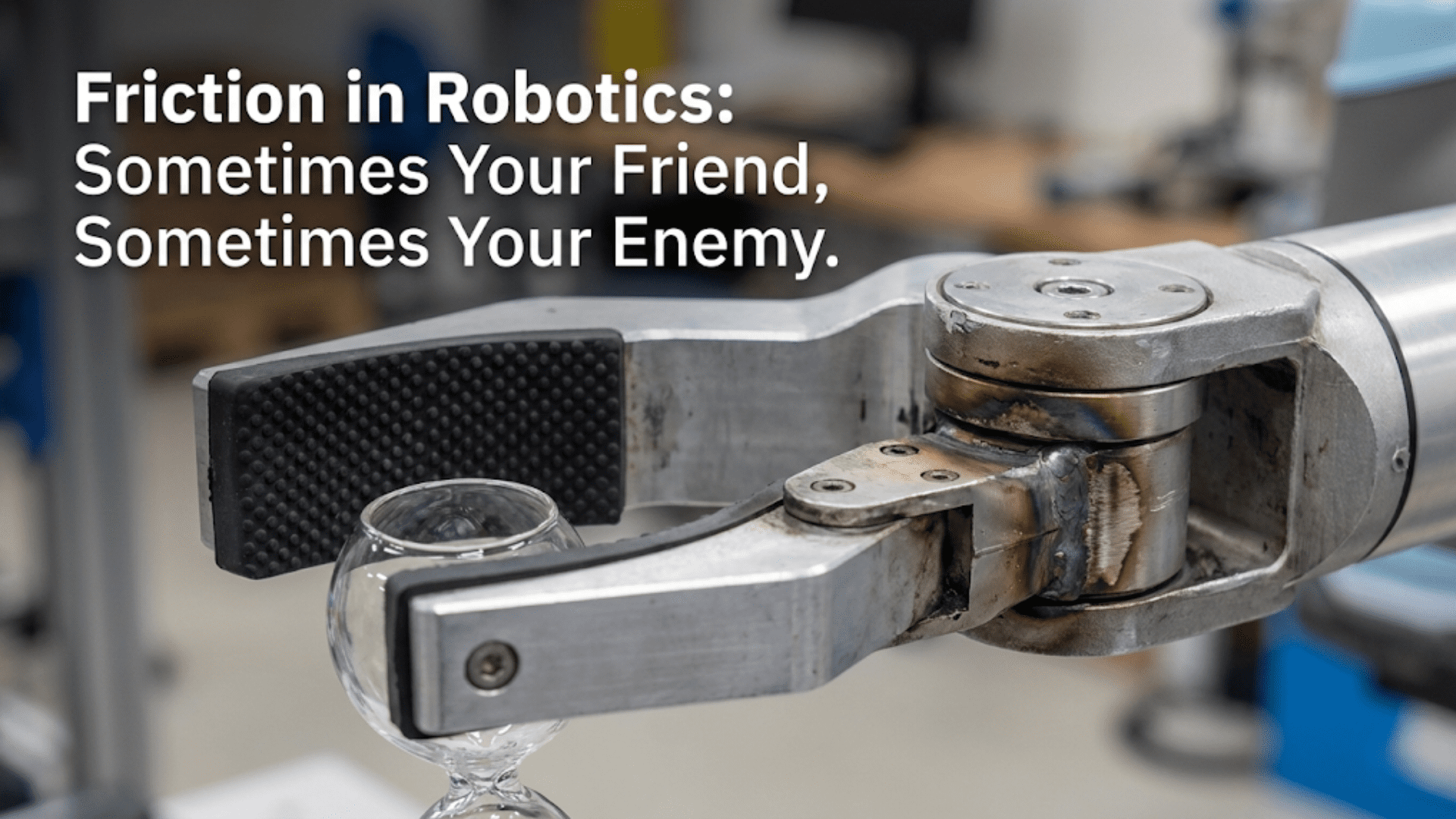
Friction in Robotics: Sometimes Your Friend, Sometimes Your Enemy
Understand how friction affects robot performance. Learn when to maximize traction and when to minimize…
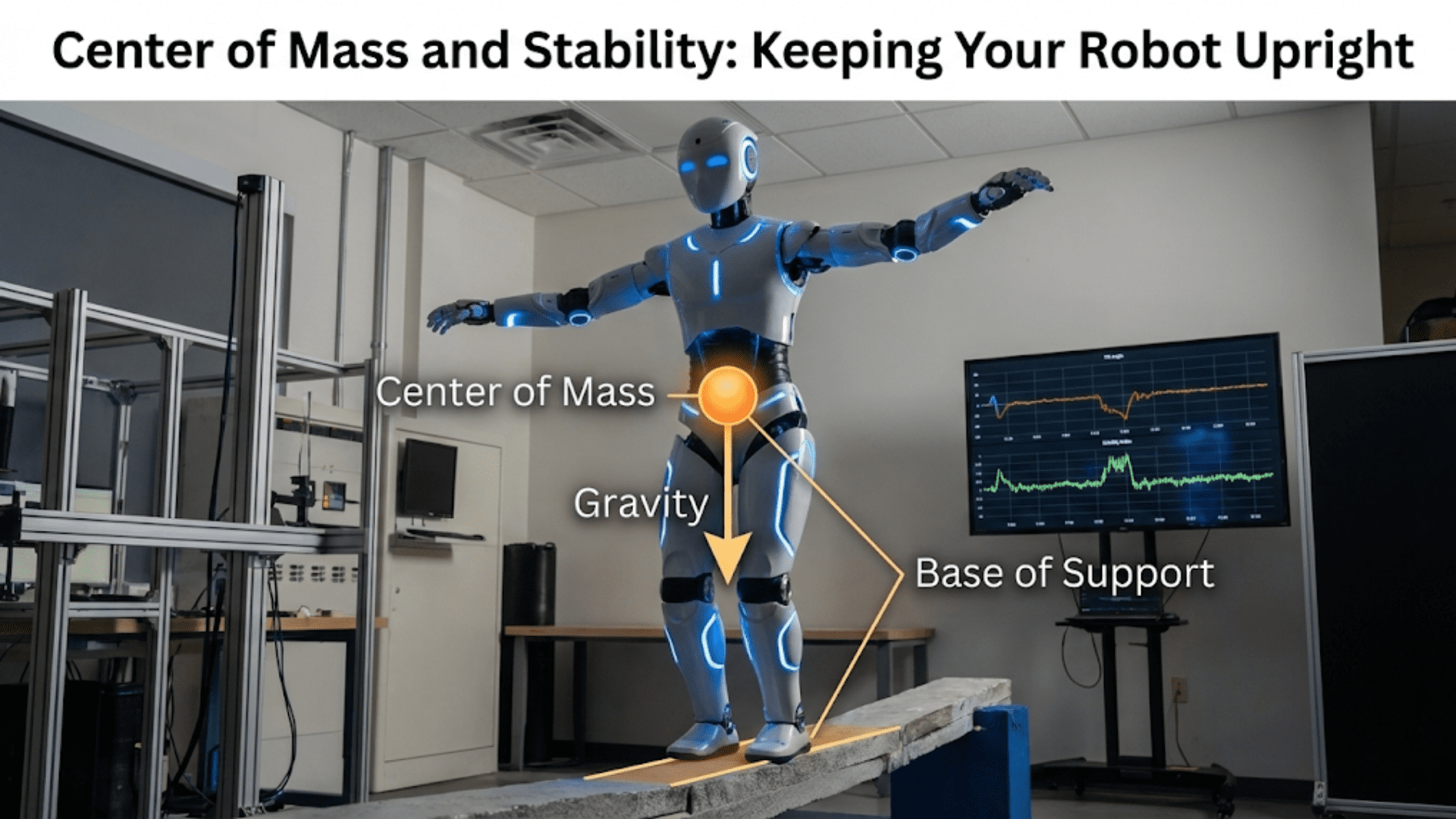
Center of Mass and Stability: Keeping Your Robot Upright
Master center of mass principles to prevent robot tipping. Learn stability calculations, design strategies, and…
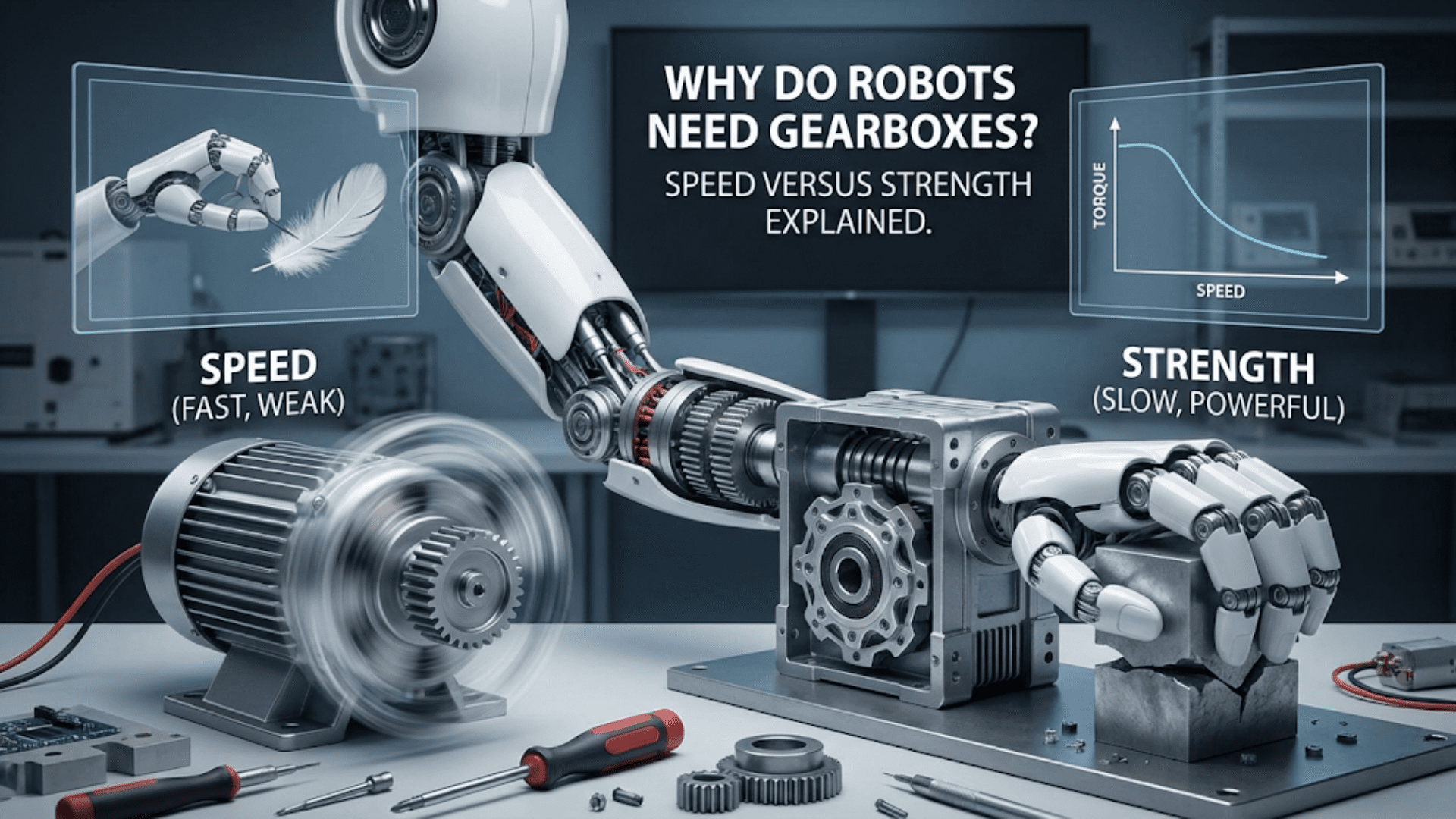
Why Do Robots Need Gearboxes? Speed Versus Strength Explained
Learn why gearboxes are essential in robotics, how gear ratios trade speed for torque, and…

