Basics
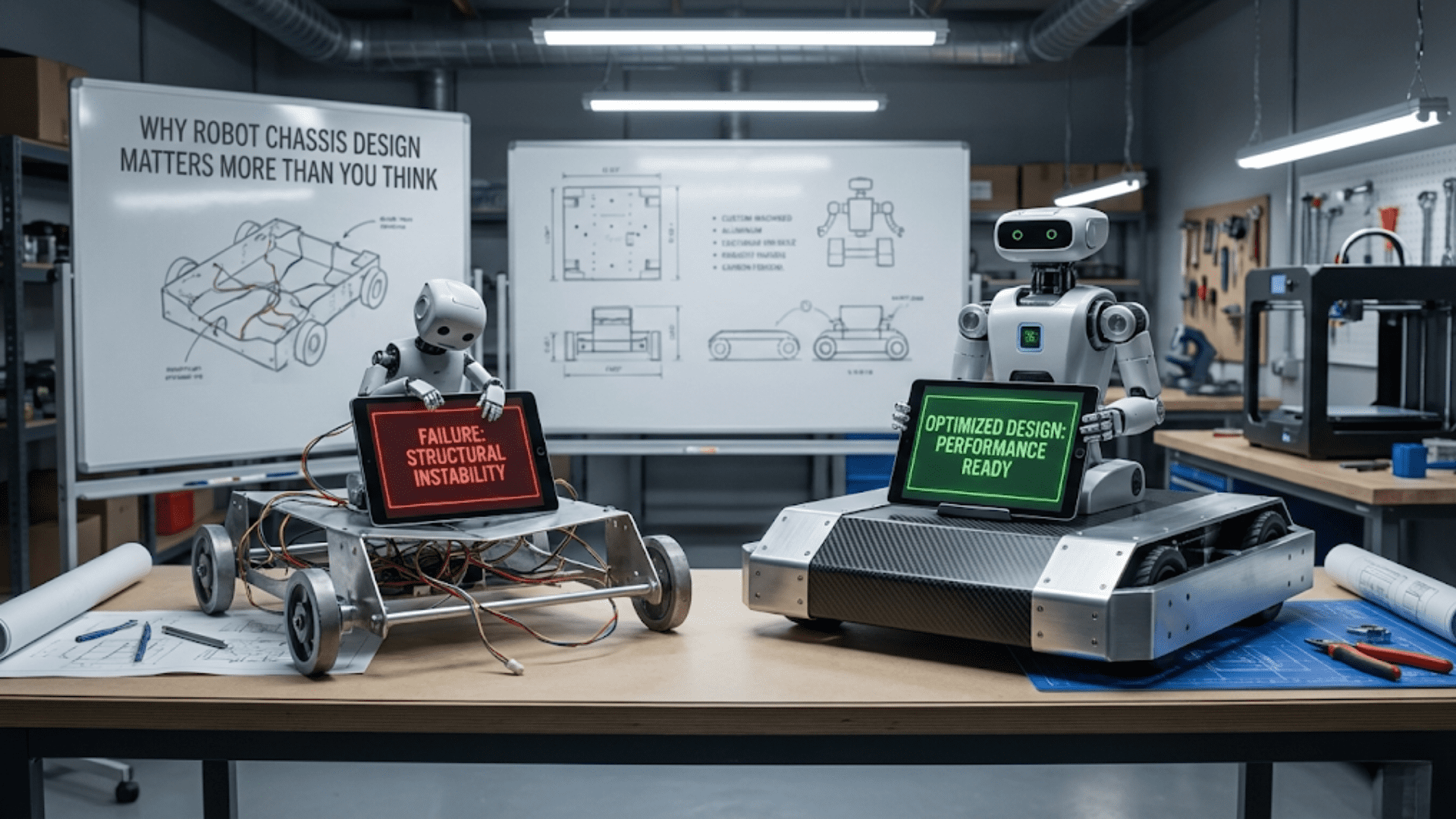
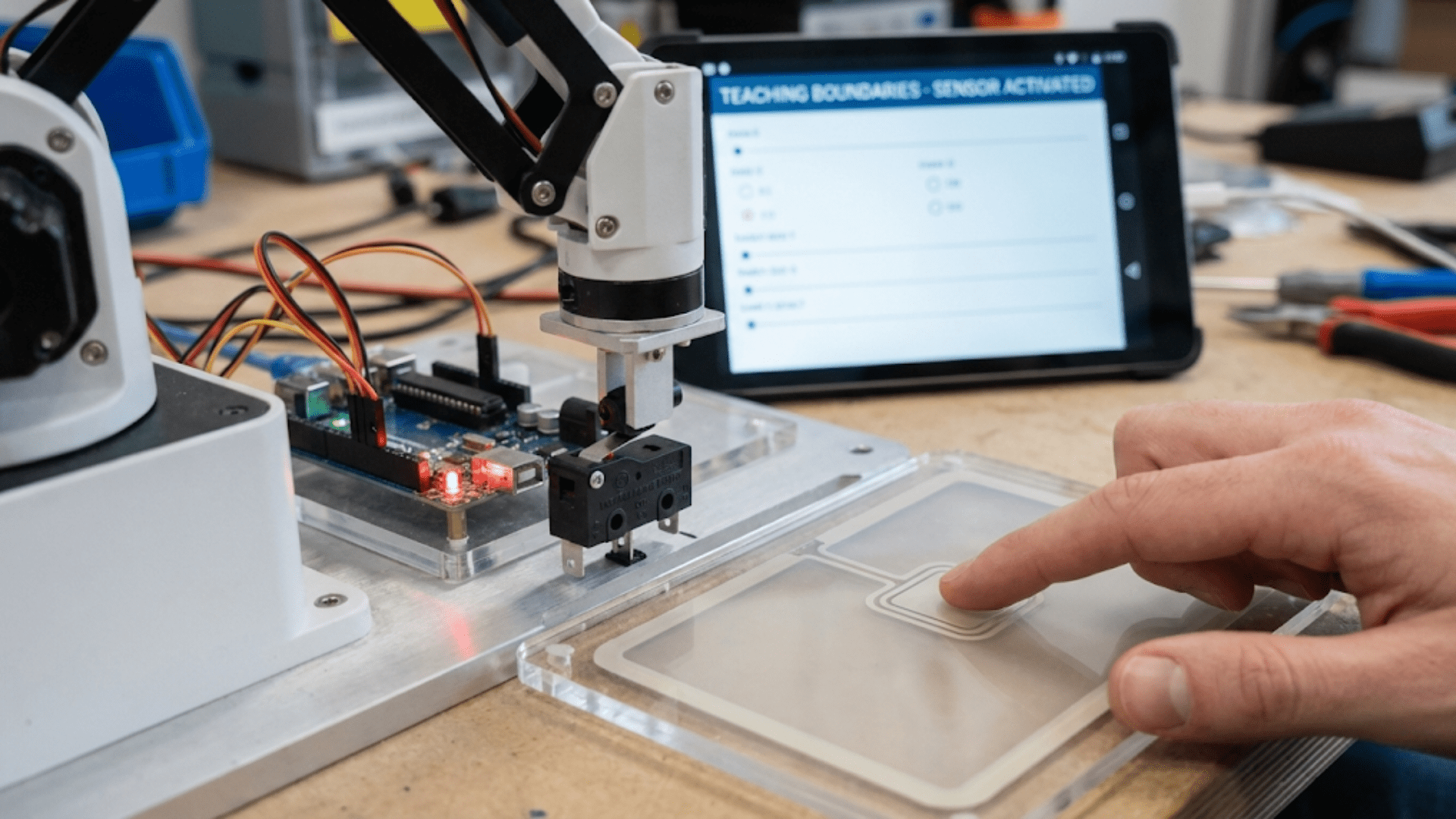
Robotics involves designing, building, and operating robots. It combines mechanical, electrical, and software engineering for tasks in various industries and applications.
Discover here!
Discover here!
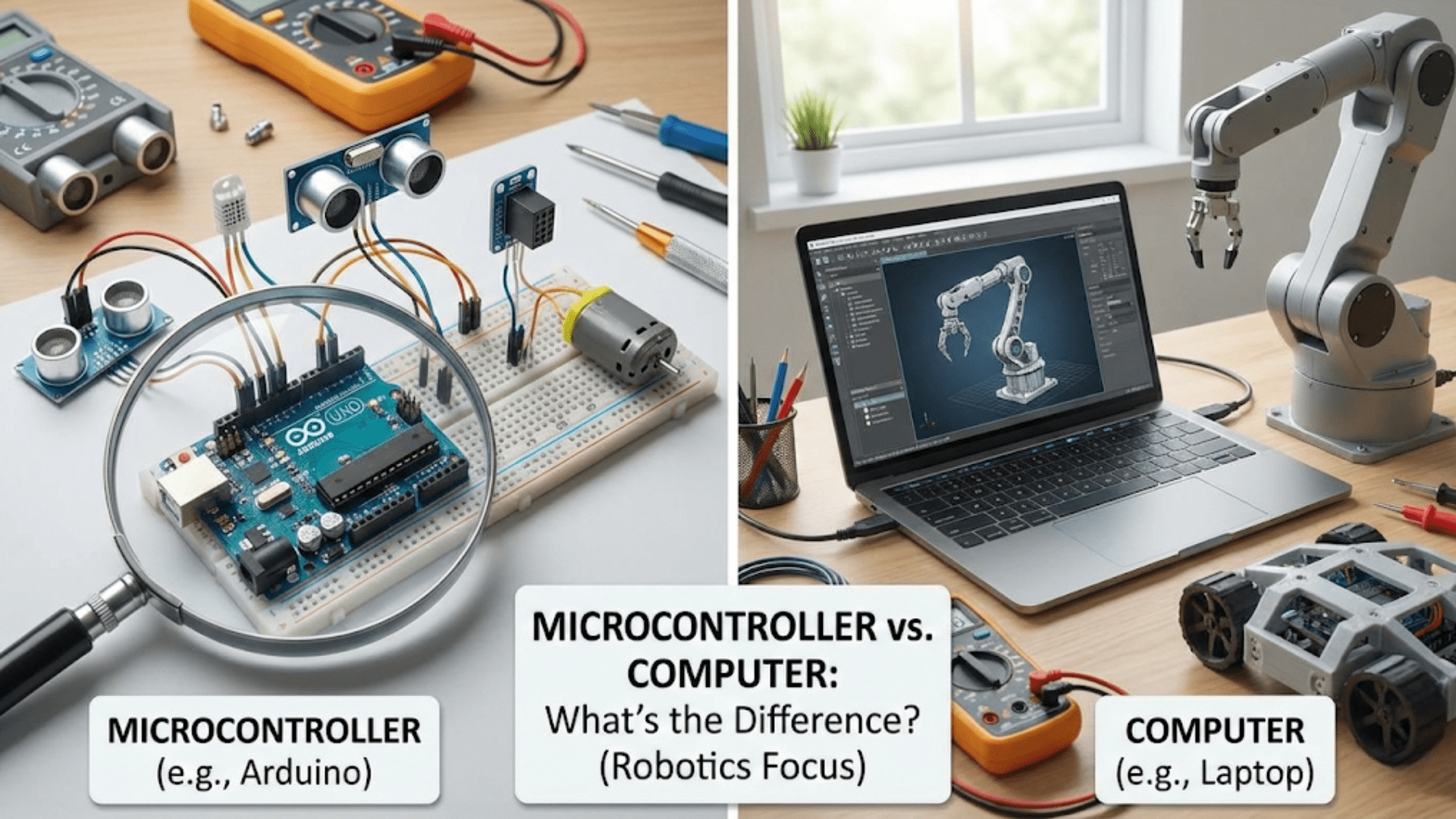
Components
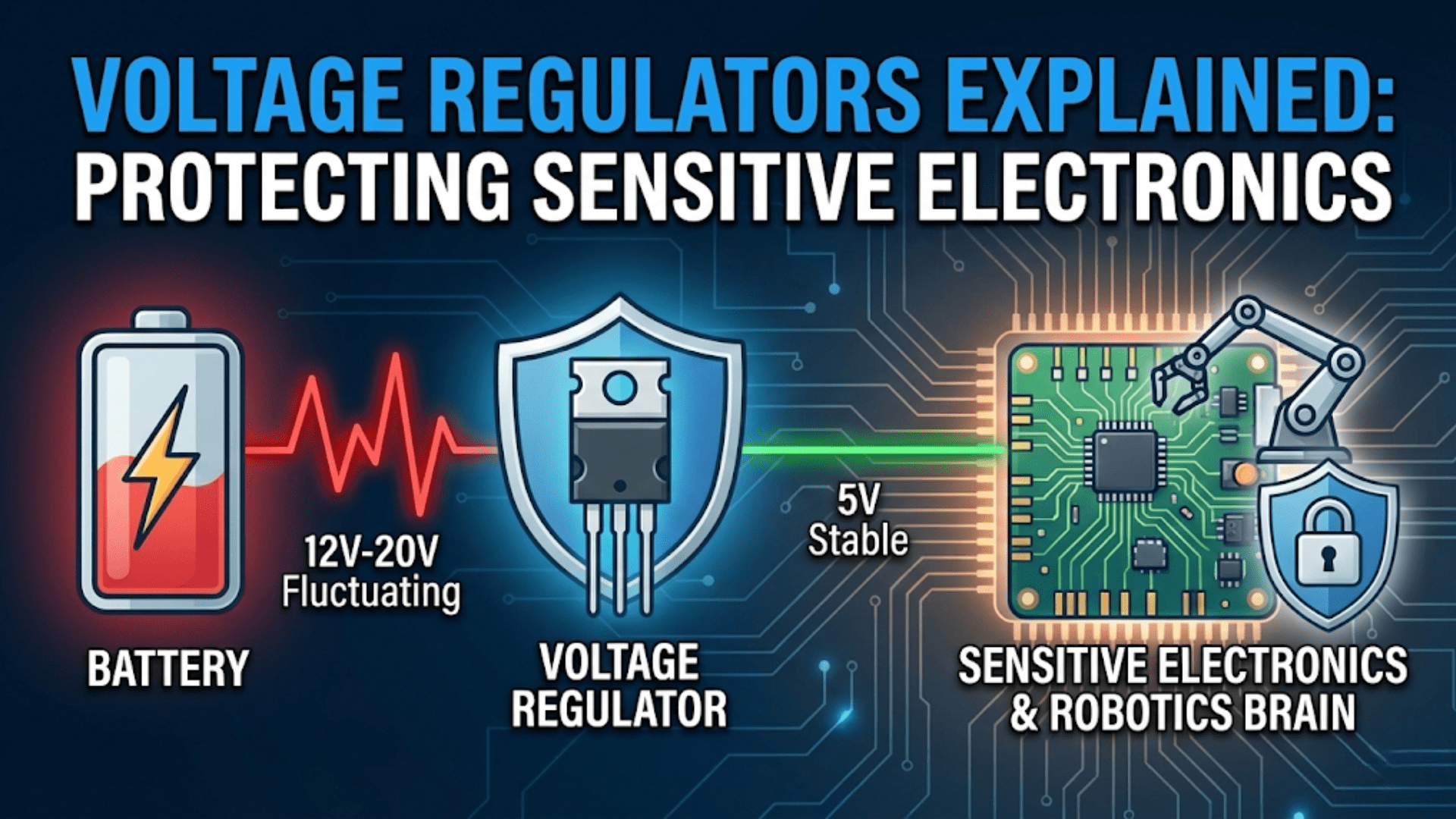
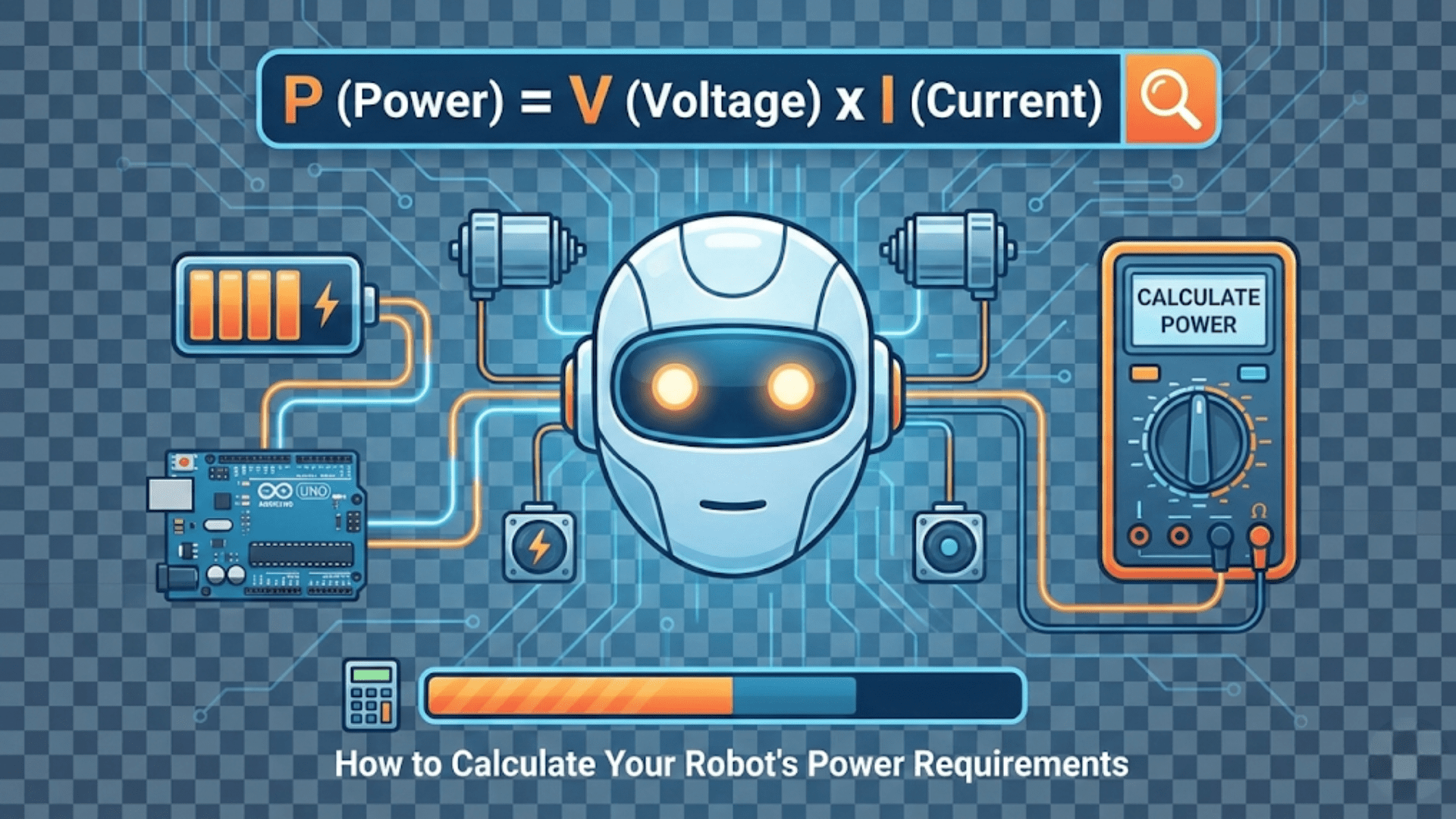
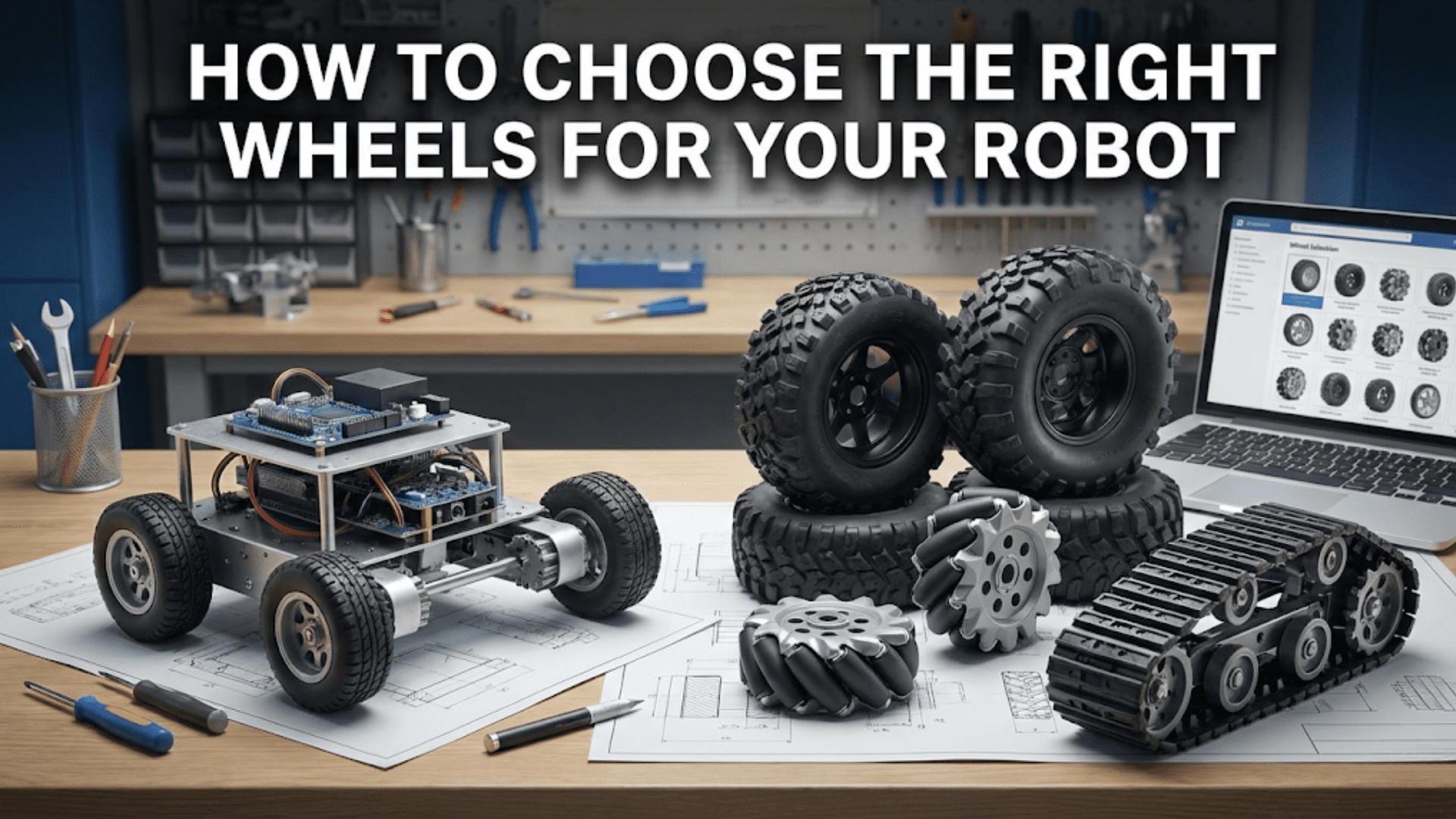
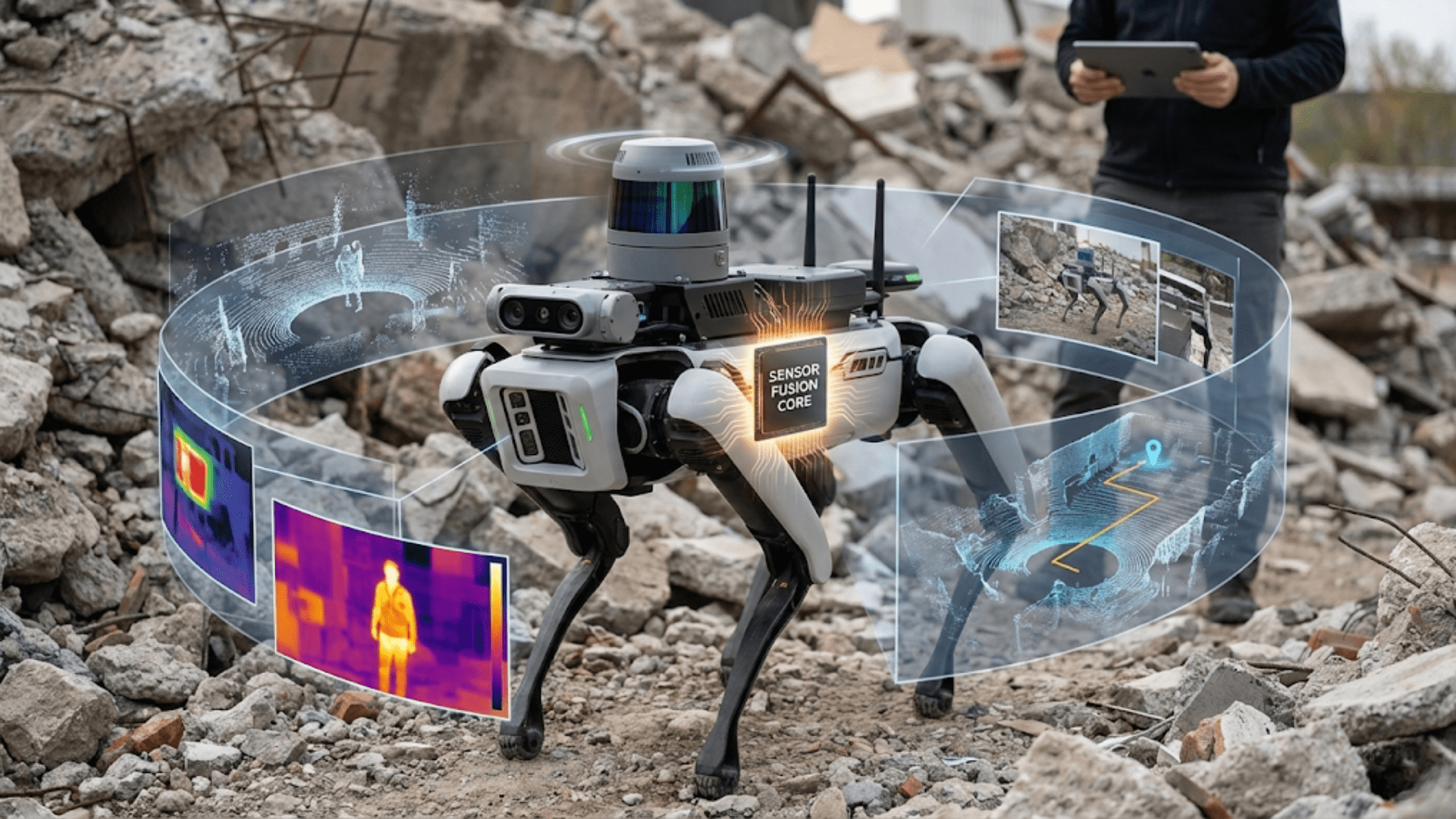
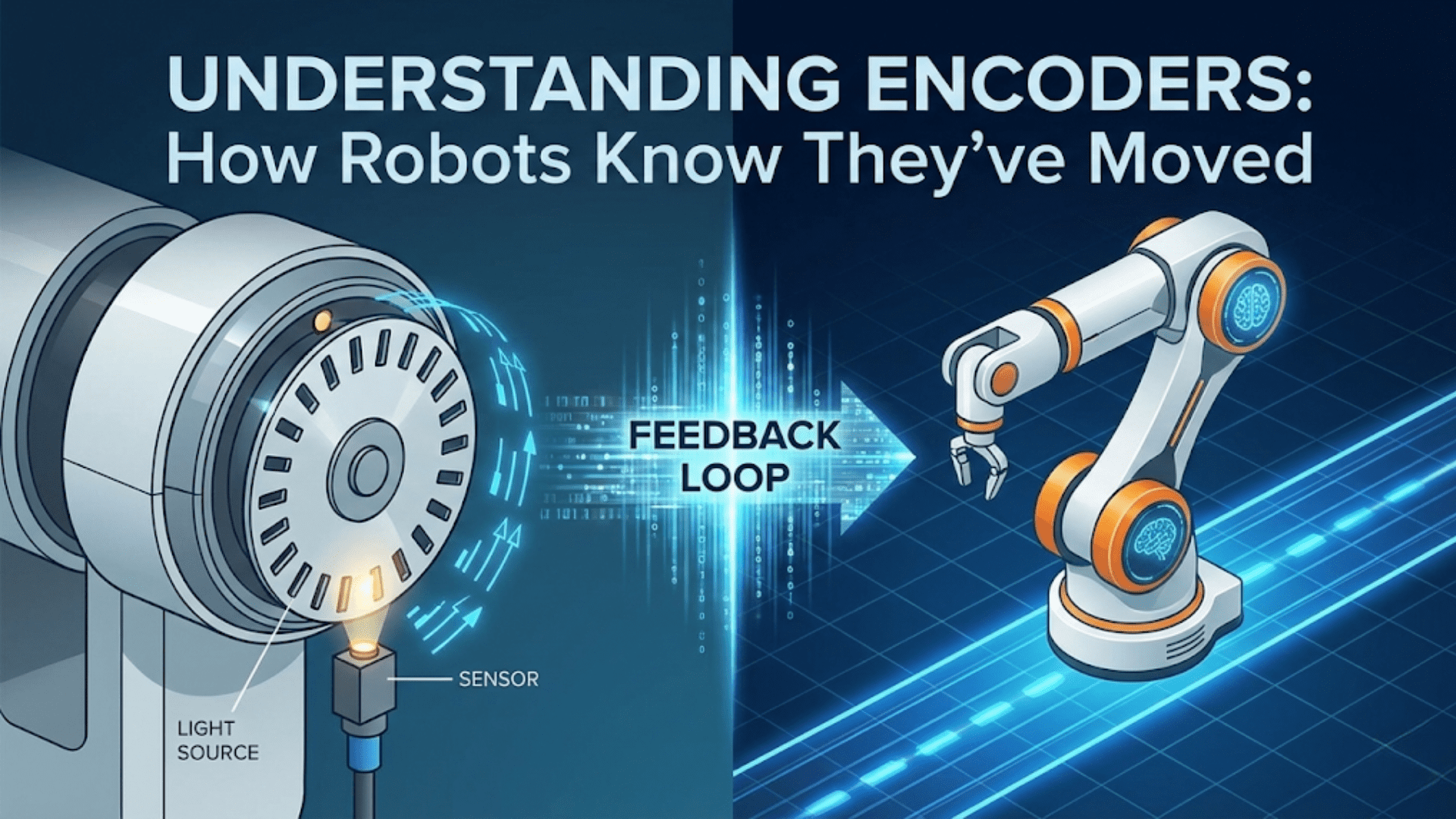
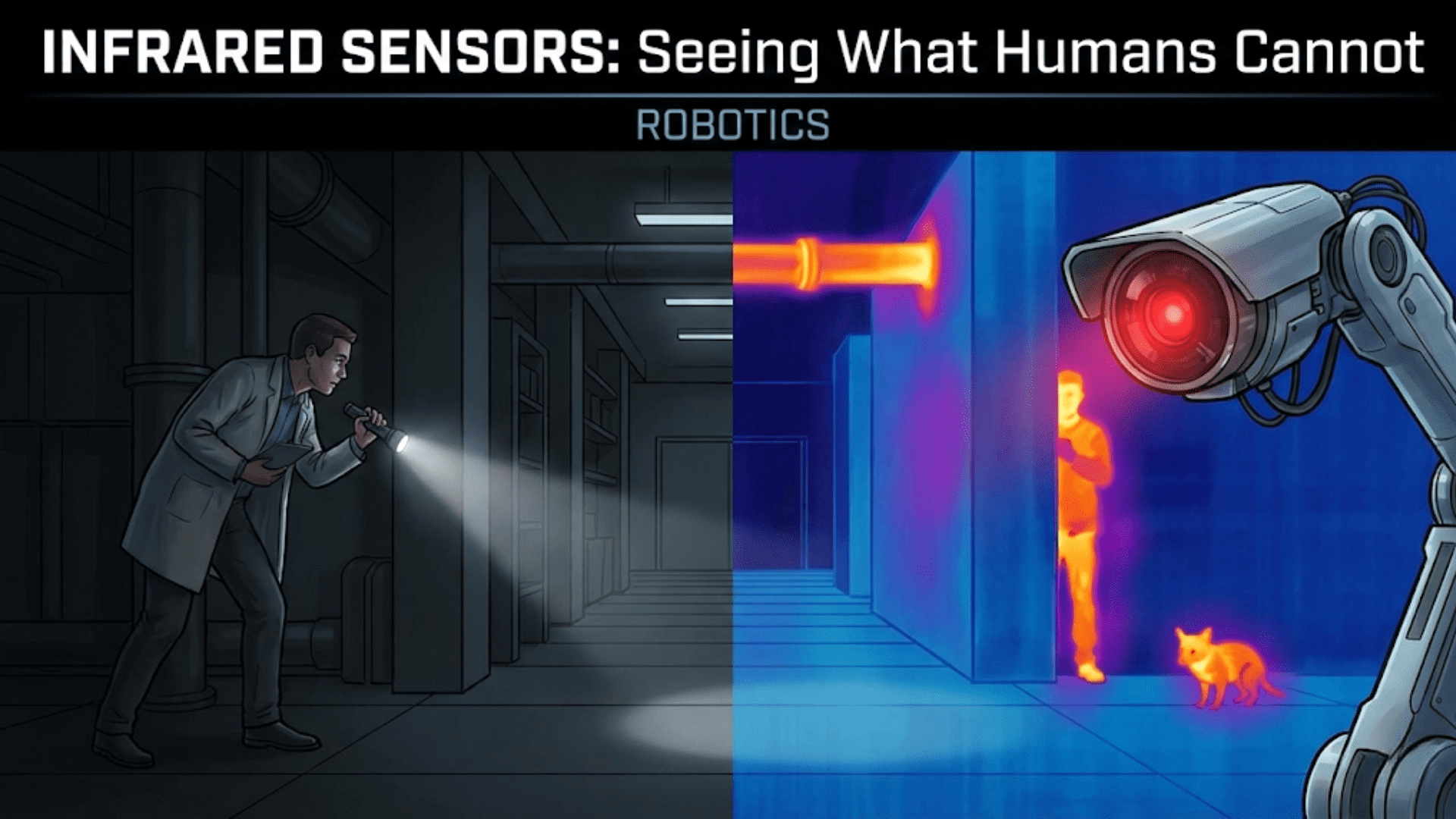
Robotics components include sensors, actuators, microcontrollers, and power sources. These elements work together to enable robots to perceive, move, and perform tasks autonomously. Explore here!