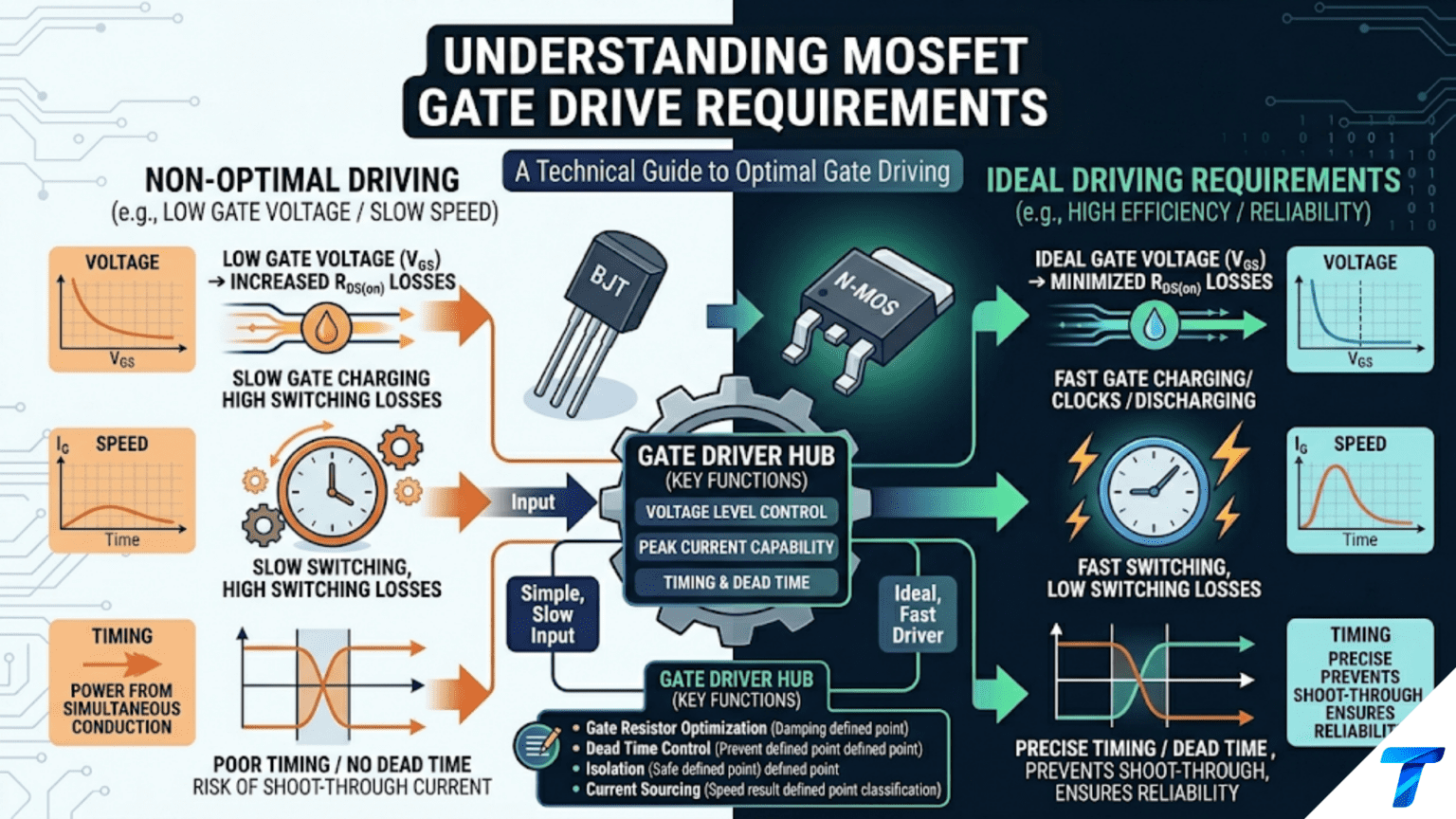
MOSFET gate drive requirements describe the voltage, current, and timing conditions needed to switch a MOSFET reliably and efficiently. Because the MOSFET gate is a capacitive load, it requires a controlled burst of current to charge and discharge — the amount determined by gate charge (Q_g). Proper gate drive ensures complete turn-on for low conduction losses, fast switching for low switching losses, and controlled transition speed to manage electromagnetic interference, making gate drive design one of the most critical aspects of any MOSFET switching circuit.
Introduction: Why Gate Drive Is More Than Just a Voltage
From the previous article, you learned that MOSFETs are voltage-controlled devices — apply the right gate-to-source voltage and the device turns on; remove it and the device turns off. This might suggest that driving a MOSFET is simply a matter of connecting a voltage source to the gate. In reality, gate drive design is considerably more nuanced, and getting it wrong is one of the most common causes of MOSFET circuit failure, excessive heat generation, and electromagnetic interference problems.
The MOSFET gate is capacitive — it behaves like a small capacitor (typically 1nF to 10nF for power MOSFETs) that must be charged to turn the device on and discharged to turn it off. Charging a capacitor requires current, and the rate at which the capacitor charges depends on the current available. Insufficient drive current means the gate charges slowly, keeping the MOSFET in its linear (saturation) region for longer during each switching transition — the precise condition where both significant voltage and current appear simultaneously, maximizing power dissipation.
But there is a tension: driving the gate faster reduces switching losses but increases the rate of change of drain current (dI/dt) and drain voltage (dV/dt). These rapid changes generate electromagnetic interference — voltage spikes that can disrupt nearby circuits, cause false triggering, and fail EMC (electromagnetic compatibility) tests. Gate drive design is fundamentally a balancing act between switching speed (for efficiency) and transition rate control (for EMI).
There are also topology-specific challenges. In a half-bridge circuit (used in motor drives and DC-DC converters), one MOSFET’s source is not at ground — it floats at the switching node voltage, which can be hundreds of volts above ground. Driving this “high-side” MOSFET requires a gate drive voltage that floats with the source, presenting a bootstrapping challenge that requires either a charge pump, an isolated supply, or a bootstrap capacitor circuit.
This article builds a complete, practical understanding of MOSFET gate drive: the gate charge curve and what each phase means, how to calculate drive current requirements, how to select appropriate gate resistors, when a dedicated gate driver IC is necessary and how to choose one, bootstrap high-side drive circuits in detail, deadtime requirements in half-bridge configurations, and design techniques for managing the switching speed versus EMI tradeoff.
The Gate Charge Curve: Understanding What Happens During Switching
The gate charge curve is the single most important piece of information for gate drive design. It shows the gate-to-source voltage (V_GS) as a function of the total charge delivered to the gate, measured with a constant current source while the MOSFET switches a defined load. Understanding this curve in detail reveals exactly what is happening in the device at each moment during switching.
Phase 1: Charging the Gate-Source Capacitance (Q_gs)
When gate drive current first flows, V_GS rises linearly (since C_gs ≈ constant and V = Q/C). During this phase, V_GS is below the threshold voltage — the channel has not yet formed and the MOSFET remains off. The drain current is essentially zero, and V_DS holds at its off-state value (determined by the circuit load or supply voltage).
This phase ends when V_GS reaches the threshold voltage V_th — the point at which drain current begins to flow. The charge delivered in this phase is Q_gs1.
As V_GS continues rising above V_th (still in Phase 1), drain current increases rapidly. The MOSFET is in its saturation region — I_D = k(V_GS − V_th)²/2. The drain current rises to the load current level. Once I_D equals the full load current, Phase 2 begins.
Total charge to bring drain current to full load: Q_gs (gate-to-source charge).
Phase 2: The Miller Plateau (Q_gd)
Once the drain current has reached the full load current, something interesting happens: V_GS stops rising even though gate drive current continues to flow. The gate voltage plateaus at a roughly constant level called the Miller plateau voltage (V_plateau).
This plateau occurs because the gate drive current is now entirely consumed charging the gate-drain capacitance C_gd (also called the Miller capacitance) rather than C_gs. During this phase:
- The drain current is approximately constant at the load current
- V_DS falls rapidly from the supply voltage toward the on-state voltage (I_D × R_DS(on))
- All gate drive current flows into C_gd, supporting the change in V_DS
The Miller plateau is visible as a flat section on the V_GS vs. charge curve. Its voltage level equals V_th + I_D / g_m where g_m is the MOSFET’s transconductance at the operating point.
Why the Miller effect is critical for switching speed:
The Miller capacitance C_gd is effectively multiplied by the voltage swing across it (V_DS_swing) when referred to the gate:
Q_gd = C_gd × V_DS_swingFor a MOSFET switching 200V with C_gd = 50pF:
Q_gd = 50pF × 200V = 10nCThis 10nC must be delivered by the gate driver to transition through the Miller plateau. The time to do so:
t_Miller = Q_gd / I_gate = 10nC / I_gateFor I_gate = 1A: t_Miller = 10ns (very fast, good) For I_gate = 10mA: t_Miller = 1µs (slow — large switching losses)
This illustrates why high gate drive current is critical during the Miller plateau: it directly determines the speed of V_DS transition and thus the switching loss.
Phase 3: Final Gate Enhancement (Q_remaining)
After V_DS has fallen to its on-state value, the Miller plateau ends and V_GS resumes rising toward the drive voltage. This phase charges C_gs further, moving the MOSFET deeper into the ohmic region and reducing R_DS(on) slightly. The additional charge required is usually small compared to Q_gd.
The total gate charge Q_g = Q_gs + Q_gd + Q_remaining. Datasheet Q_g values are specified for the complete transition (V_GS = 0 to specified drive voltage).
The Turn-Off Sequence
Turn-off is the reverse process:
- Gate drive current reverses (gate discharges)
- V_GS falls through the top enhancement region (quick)
- V_GS enters the Miller plateau — stays constant while V_DS rises from on-state to supply voltage (this is the slow, lossy phase)
- V_GS falls below threshold — drain current falls to zero
- V_GS reaches 0V — device fully off
The Miller plateau during turn-off is equally critical. Gate drive must sink current rapidly during turn-off to discharge C_gd and allow V_DS to rise quickly.
Practical Gate Charge Numbers
| MOSFET | V_DSS | I_D | R_DS(on) | Q_g (total) | Q_gd | Application |
|---|---|---|---|---|---|---|
| 2N7002 | 60V | 300mA | 7.5Ω | 1.7nC | 0.5nC | Small signal, logic |
| IRLZ44N | 55V | 47A | 22mΩ | 63nC | 22nC | Motor control, 5V drive |
| IRFZ44N | 55V | 49A | 17.5mΩ | 85nC | 38nC | Power switching |
| IRF3205 | 55V | 110A | 8mΩ | 170nC | 71nC | High current |
| IRF840 | 500V | 8A | 0.85Ω | 63nC | 34nC | High voltage |
| STP36NF06L | 60V | 30A | 35mΩ | 46nC | 22nC | Logic level |
Notice the tradeoff: lower R_DS(on) generally means larger die area, which means larger capacitances and higher Q_g. Choosing the lowest R_DS(on) MOSFET is not always optimal for switching applications — the increased gate charge may cause excessive switching losses.
Calculating Gate Drive Current Requirements
Peak Gate Current
The peak gate drive current determines how fast the gate charges through the gate resistor:
I_gate_peak = (V_drive − V_GS_plateau) / R_g_totalWhere R_g_total = R_gate_driver_output + R_g_external + R_g_internal.
The gate driver’s output resistance (R_gate_driver_output) is the on-resistance of the driver’s output transistor — typically 0.5Ω to 10Ω for dedicated drivers, 10Ω to 50Ω for logic gate drivers, and 25Ω to 50Ω for microcontroller GPIO pins.
During the Miller plateau, V_GS ≈ V_plateau (constant), so the full voltage difference drives current through R_g_total into C_gd:
I_Miller = (V_drive − V_plateau) / R_g_totalExample: V_drive = 12V, V_plateau = 4V (typical for moderate V_DS), R_g_external = 10Ω, R_gate_driver = 2Ω:
I_Miller = (12 − 4) / (10 + 2) = 8 / 12 = 667mAThis is the current available to charge C_gd and pull V_DS down. At 667mA with Q_gd = 30nC:
t_Miller = 30nC / 667mA = 45nsReasonable for a 100kHz switching supply. For 1MHz operation, R_g would need to be much smaller to reduce this transition time.
Average Gate Drive Power
The average power consumed by the gate drive circuit (dissipated in R_g_total, not in the MOSFET gate oxide):
P_gate = Q_g × V_drive × f_switchingFor Q_g = 63nC, V_drive = 12V, f = 100kHz:
P_gate = 63×10⁻⁹ × 12 × 100,000 = 75.6mWThis is the total gate drive power. It splits between the pull-up resistance (during charging) and pull-down resistance (during discharging). For symmetric R_g:
- Power in R_g during charge: Q_g × V_drive/2 × f = 37.8mW
- Power in R_g during discharge: same ≈ 37.8mW
- Total: 75.6mW (all dissipated in resistances, not the gate itself)
At higher switching frequencies, gate drive power increases linearly. At 1MHz with the same device:
P_gate = 63×10⁻⁹ × 12 × 1,000,000 = 756mWThis substantial power must be provided by the gate driver and dissipated in the gate resistor — a significant design constraint at megahertz frequencies.
Checking Microcontroller GPIO Sufficiency
A microcontroller GPIO pin typically sources/sinks 8mA to 40mA. Is this enough to drive a power MOSFET?
For a small logic MOSFET (2N7002, Q_g = 1.7nC) at 10kHz:
P_gate = 1.7×10⁻⁹ × 5 × 10,000 = 85µWNegligible power. Peak current during switching through 100Ω gate resistor:
I_peak = 5V / 100Ω = 50mAExceeds a 40mA GPIO limit during the brief switching instant. Use R_g = 150Ω to keep peak current at 33mA within GPIO limits, accepting slightly slower switching.
For a medium power MOSFET (IRLZ44N, Q_g = 63nC) at 20kHz:
P_gate = 63×10⁻⁹ × 5 × 20,000 = 6.3mW
Average gate current = P_gate / V_drive = 6.3mW / 5V = 1.26mA averageAverage current is fine for a GPIO. But peak current:
I_peak = 5V / (R_g + R_GPIO_output) ≈ 5V / (47Ω + 50Ω) ≈ 52mAExceeds GPIO limits during each switching transition. At 20kHz, the transitions occur 20,000 times per second — the GPIO is regularly overloaded. Use a gate driver IC.
Rule of thumb: Use a dedicated gate driver when:
- Q_g > 20nC, OR
- f_switching > 50kHz, OR
- You need switching times below 100ns
Gate Driver ICs: When and How to Use Them
What a Gate Driver IC Does
A gate driver IC is a buffer amplifier optimized for driving capacitive MOSFET gates. It accepts a logic-level input signal (from a microcontroller, PWM controller, or digital logic) and outputs the same switching waveform but with the current drive capability to charge and discharge the MOSFET gate rapidly.
Key specifications:
- Peak output current: 0.5A to 9A — far exceeding any GPIO pin
- Propagation delay: 10ns to 100ns — ensures the output edge closely tracks the input
- Output resistance: 0.5Ω to 5Ω (far lower than GPIO impedance)
- Input logic compatibility: 3.3V and 5V CMOS inputs
- Rise/fall times: 10ns to 100ns into specified gate capacitance
Single-Channel Gate Drivers
TC4420/TC4429 (Microchip):
- Peak output current: 6A (TC4420 inverting, TC4429 non-inverting)
- Supply: 4.5V to 18V
- Propagation delay: 55ns typical
- Package: SOT-23-5, 8-DIP
- Cost: ~$0.50
The TC4420/TC4429 is the go-to single-channel gate driver for most switching applications. It handles virtually any power MOSFET with ease.
UCC27524 (Texas Instruments):
- Peak output current: 5A
- Supply: 4.5V to 18V
- Propagation delay: 13ns — very fast
- Separate source and sink outputs for different turn-on/turn-off speeds
- Package: SOT-23-5, 8-SOIC
MIC4422/MIC4423 (Microchip):
- Peak output current: 9A — industry-leading
- Supply: 4.5V to 18V
- Package: 8-DIP, 8-SOIC
Half-Bridge Gate Drivers
For half-bridge and H-bridge topologies, a dedicated half-bridge driver integrates both the high-side and low-side drive channels with built-in deadtime and (usually) bootstrap high-side supply:
IR2104 (Infineon):
- Supply: 10V to 20V (VCC), bootstrap: up to 600V offset
- Peak current: 0.6A source, 0.6A sink
- Built-in deadtime: 520ns (not adjustable)
- Package: 8-DIP, 8-SOIC
- Input: SD (shutdown) and IN (direction)
IR2110 (Infineon):
- Supply: 10V to 20V, bootstrap: up to 600V
- Peak current: 2A source, 2A sink
- No built-in deadtime — requires external control
- Separate HIN (high-side input) and LIN (low-side input) for independent control
- Package: 14-DIP, 16-SOIC
- Popular for motor drives and inverters
DRV8302 (Texas Instruments):
- Three-phase gate driver for BLDC motor control
- Built-in current sensing
- SPI interface for configuration
- Package: HTSSOP-56
- Popular in drone ESC (Electronic Speed Controller) designs
Isolated Gate Drivers
For high-side switches in high-voltage systems (above ~100V), or when the MOSFET’s source is not referenced to the control ground, isolated gate drivers use optocouplers or transformers to transmit the switching signal across an isolation barrier:
HCPL-314J (Broadcom): Optocoupler-based gate driver, 2.5A output, for up to 1200V IGBT/MOSFET drives. Used in industrial inverters and motor drives.
Si8271 (Silicon Labs): Capacitive isolation, 4A output, 150ns propagation delay, 5kV isolation. Modern isolated driver using capacitive coupling rather than optocoupler.
Gate drive transformers: For pulse-width modulated signals, a small ferrite core transformer transmits both the switching signal and a small amount of drive energy across galvanic isolation. Simpler and cheaper than optocoupler-based drivers for duty cycles between 10% and 90%, but cannot transmit DC (blocks for 100% or 0% duty cycle).
Separate Turn-On and Turn-Off Resistors
A powerful and simple technique for independently optimizing turn-on speed (for switching losses) and turn-off speed (for body diode reverse recovery and dV/dt control) uses separate gate resistors for each transition:
Circuit: Add a diode (1N4148) in parallel with R_g, oriented so it conducts during turn-on or turn-off:
Configuration A — Slower turn-on, faster turn-off:
- R_g_on: series with diode (anode toward gate driver, cathode toward gate)
- R_g_off: in the main gate path
- Turn-on: current flows through R_g_on + R_g_off in series (diode reverse biased)
- Turn-off: current flows through diode (forward biased) bypassing R_g_on, only R_g_off limits current
Wait — let me clarify the circuit correctly:
Configuration B — The standard approach:
- Place diode D1 (1N4148) in parallel with R_g_on, with cathode toward the driver and anode toward the gate
- Place R_g_off separately in series with the gate, always in circuit
- Or more commonly:
Practical implementation:
- R_g_on: from driver output to gate (controls turn-on speed)
- R_g_off: diode D1 in series from gate to driver ground/low side, bypassing R_g_on during turn-off
Actually, the most common practical implementation:
Driver output → R_g_on → Gate
Gate → D1 (anode to gate, cathode to driver output) → Driver output During turn-on: Driver output goes HIGH. Current flows forward through R_g_on to charge gate. D1 is reverse biased (cathode high).
During turn-off: Driver output goes LOW. Gate is more positive than driver output. Current flows forward through D1 (bypassing R_g_on) and through R_g_off if present, discharging gate rapidly.
This allows:
- Slow turn-on (large R_g_on) to limit dI/dt and dV/dt — reduces EMI
- Fast turn-off (diode bypass, small R_g_off) to reduce body diode conduction time and minimize shoot-through risk
Typical values:
- R_g_on: 22Ω to 100Ω (slows turn-on)
- R_g_off: 4.7Ω to 22Ω (faster turn-off)
- D1: 1N4148 (fast switching diode, not a rectifier diode)
Bootstrap High-Side Gate Drive: The Complete Picture
The bootstrap circuit is the most common method for driving a high-side N-channel MOSFET in a half-bridge configuration. Understanding it thoroughly is essential for any power electronics design.
The High-Side Drive Problem
In a half-bridge circuit:
- Q_high: high-side N-channel MOSFET, drain connected to V_supply, source connected to switching node V_sw
- Q_low: low-side N-channel MOSFET, drain connected to V_sw, source connected to GND
When Q_high is on:
- V_sw = V_supply (nearly)
- V_source(Q_high) = V_supply
- To turn Q_high on, V_gate must exceed V_source + V_th = V_supply + 2–4V
For a 48V supply, the gate must be driven to 52–58V — above the supply voltage. No standard logic or gate driver can provide this from a 48V supply without additional circuitry.
The Bootstrap Solution
The bootstrap circuit provides a floating supply that generates a voltage above V_sw:
Circuit elements:
- C_boot: bootstrap capacitor, typically 100–220nF ceramic + 1–10µF electrolytic in parallel
- D_boot: bootstrap diode, fast recovery or Schottky (1N4148 works for low voltage; dedicated fast diode for high voltage)
Operating principle:
Step 1 — Bootstrap charging (Q_low on, Q_high off): When Q_low turns on, V_sw drops to approximately 0V (ground through Q_low). The bootstrap diode D_boot becomes forward biased, connecting V_CC (the gate driver’s supply, typically 12–15V) to C_boot through D_boot. C_boot charges to V_CC − V_D_boot ≈ 11.3V (with 0.7V diode drop) in a few hundred nanoseconds.
Step 2 — High-side switch on (Q_high on, Q_low off): When Q_high turns on, V_sw rises toward V_supply. D_boot becomes reverse biased (cathode rises with V_sw, anode is held at V_CC which is much lower). C_boot is now isolated — its charge is maintained. With V_sw at V_supply (say, 48V) and C_boot charged to 11.3V:
V_boot_high = V_sw + V_C_boot = 48V + 11.3V = 59.3V
The gate driver’s high-side output can now drive the high-side gate to 59.3V — sufficient to turn on Q_high (V_GS = 59.3 − 48 = 11.3V ≥ 10V required).
Bootstrap capacitor sizing:
The bootstrap capacitor must supply gate charge to turn on the high-side MOSFET plus any leakage current during the on-time:
C_boot ≥ (Q_g_high + Q_leakage × t_on_max) / ΔV_boot_allowedWhere ΔV_boot_allowed is the maximum acceptable droop in bootstrap voltage (typically 1–2V):
For Q_g = 30nC, Q_leakage = 5nC (gate driver quiescent current × on-time), ΔV = 1V:
C_boot ≥ 35nC / 1V = 35nFUse 100nF minimum (3× margin) plus a 10µF electrolytic for bulk charge supply. The 100nF ceramic handles fast transients; the electrolytic handles longer duty cycles.
Bootstrap limitations:
- Maximum duty cycle: The bootstrap capacitor must recharge during the low-side on-time. For 100% duty cycle, the low-side never turns on, C_boot never recharges, and the high-side eventually loses gate drive. Maximum duty cycle for bootstrap circuits is typically 90–95%. For 100% duty cycle operation, use a charge pump or isolated gate driver.
- Minimum on-time: For the bootstrap to recharge adequately, the low-side switch must be on long enough to charge C_boot — typically at least a few hundred nanoseconds to a few microseconds.
- Voltage limitations: The bootstrap capacitor voltage appears across D_boot and across the gate driver’s high-side output transistor. These components must be rated for V_supply + V_CC (total blocking voltage). Most bootstrap-capable gate driver ICs specify their maximum offset voltage (V_supply) — for example, the IR2110 is rated to 600V.
- Negative V_sw transients: During switching transitions, the V_sw node can go slightly negative due to diode reverse recovery and parasitic inductance. If V_sw goes below −5V to −10V, the bootstrap diode may be destroyed or the gate driver’s V_S pin may be damaged. Add a fast Schottky clamp diode from V_sw to GND (anode to GND, cathode to V_sw) to limit negative excursions.
Bootstrap Diode Selection
The bootstrap diode must turn off quickly when V_sw rises (to prevent C_boot from discharging back through the diode). Use:
- 1N4148: Adequate for voltages below 30V and moderate switching frequencies
- UF4007: Ultrafast rectifier for voltages up to 1000V, 75ns reverse recovery
- STPS2H100: Schottky, 100V, 2A — best choice for fast switching; Schottky diodes have negligible reverse recovery
Deadtime Management in Half-Bridge Circuits
What Is Deadtime and Why Is It Essential?
In a half-bridge circuit, Q_high and Q_low must never conduct simultaneously — this “shoot-through” condition connects V_supply directly to ground through two low-impedance MOSFETs, causing catastrophic current flow limited only by parasitic inductance and resistance (often kiloamps for microseconds — enough to destroy both devices).
Deadtime is the brief period between turning off one switch and turning on the other, ensuring both are fully off before either turns on:
Timeline (turn-on of Q_high after Q_low turn-off):
1. Q_low turns off (gate driven to 0V)
2. Wait: t_deadtime (deadtime period)
3. Q_high turns on (gate driven to V_boot)During the deadtime, the load current (from an inductive load like a motor winding) must flow somewhere. It flows through the body diode of whichever MOSFET is not yet conducting — the body diode acts as a freewheeling diode.
Calculating Minimum Deadtime
The minimum deadtime must be greater than the turn-off time of the outgoing switch:
t_deadtime_min = t_off_slower + t_marginWhere t_off is the time from gate command to complete current commutation, including:
- Gate discharge time through R_g
- Miller plateau duration during V_DS rise
- Reverse recovery time of the body diode of the incoming switch
A practical guideline:
t_deadtime ≥ 3 × t_fall_worst_caseFor a MOSFET with 50ns fall time: t_deadtime ≥ 150ns For a MOSFET with 200ns fall time: t_deadtime ≥ 600ns
Consequences of Insufficient Deadtime
Too short: Shoot-through — both MOSFETs conduct simultaneously. Current spikes to hundreds of amps. Thermal destruction of devices, trace vaporization, and component damage.
Too long: During deadtime, current flows through the body diode with ~0.7V forward drop (or 1.5–2V for high-voltage MOSFETs). This diode conduction loss:
P_diode = V_f × I_load × t_deadtime × f_switching × 2 (for two transitions per cycle)For V_f = 1V, I_load = 5A, t_deadtime = 500ns, f = 100kHz:
P_diode = 1 × 5 × 500×10⁻⁹ × 100,000 × 2 = 500mWThis 500mW is dissipated in the MOSFETs’ body diodes — unnecessarily if the deadtime could be reduced. Excess deadtime also adds conduction losses for high-frequency designs.
Adaptive Deadtime
Advanced gate driver ICs (like the UCC21520, LM5113, or FAN7382) implement adaptive deadtime: they monitor the switching node voltage and automatically turn on the next switch the moment the body diode begins conducting (V_sw crosses zero). This minimizes body diode conduction time without risking shoot-through, optimizing efficiency across all operating conditions.
Gate Voltage Clamping and Protection
Maximum Gate Voltage
The MOSFET gate oxide is extremely thin (2–10nm) — it can be damaged or destroyed by gate-to-source voltages exceeding the absolute maximum rating (typically ±20V for power MOSFETs, ±10V for some logic-level devices). Gate oxide breakdown is permanent and catastrophic.
Sources of excessive gate voltage:
- Inductive voltage spikes from gate wiring inductance: fast switching through even a few nanohenries of gate trace inductance creates voltage overshoot (V = L × dI/dt)
- Driver supply voltage transients
- Electrostatic discharge during handling
Protection methods:
Gate clamping with Zener diode: Place a Zener (15V for standard MOSFETs, 8.2V for logic-level types) between gate and source. The Zener clamps gate voltage to the Zener breakdown voltage, protecting against overshoots. Use a fast Zener (1N5245B for 15V, 1N4744A for 15V at higher power). Place as close to the MOSFET as possible.
Gate resistor: The gate resistor inherently limits dV/dt at the gate and reduces ringing amplitude. Even a small R_g (4.7Ω to 10Ω) significantly reduces gate voltage overshoot.
PCB layout: Minimizing gate loop inductance (short, wide gate traces; ground plane directly below) reduces inductive spikes. See PCB layout section below.
Negative Gate Drive for Robust Turn-Off
In noisy environments, a positive-going noise spike on the gate during the off-state can momentarily exceed V_th and turn on the MOSFET unintentionally — called dV/dt-induced turn-on or Miller-induced turn-on. This occurs when fast-rising V_DS (from the opposite switch turning on) capacitively couples through C_gd to the gate.
The Miller capacitance effect during off-state:
When the switch is off and V_DS rises rapidly (dV/dt), the Miller capacitance C_gd couples a charge onto the gate:
ΔQ_gate = C_gd × ΔV_DS
ΔV_gate = ΔQ_gate / (C_gs + C_gd)For C_gd = 30pF, ΔV_DS = 400V in 50ns (dV/dt = 8V/ns), C_gs = 300pF:
ΔQ_gate = 30pF × 400V = 12nC
ΔV_gate = 12nC / (300pF + 30pF) = 36V — catastrophic false turn-on!In practice, R_g limits this spike by providing a discharge path:
ΔV_gate = ΔQ_gate / (C_gs + C_gd) × e^(−t/R_g×(C_gs+C_gd))Lower R_g dissipates the charge faster. But R_g is constrained by EMI requirements.
The robust solution: negative gate drive. Drive the gate to −5V (for standard MOSFETs) or −2V (for logic-level devices) during the off-state instead of 0V. Now the Miller spike must overcome not just V_th but also the negative bias:
Required spike: V_th + 5V = 7V for a standard device with V_th = 2V
This provides a 7V noise margin rather than just 2V — much more robust against high dV/dt. Dedicated half-bridge gate drivers often provide split-rail supplies (±15V) for this reason.
PCB Layout for Gate Drive Circuits
PCB layout is critically important for gate drive circuits. Errors in layout cause oscillation, excessive switching losses, EMI, and device failure even when the schematic is correct.
The Gate Drive Loop
The gate drive loop consists of: gate driver output → gate resistor → MOSFET gate → MOSFET source → gate driver ground. This loop must be as small as possible because:
V_spike = L_loop × dI/dtFor L_loop = 20nH (a few centimeters of PCB trace) and dI/dt = 1A/10ns = 100MA/s:
V_spike = 20×10⁻⁹ × 100×10⁶ = 2VA 2V gate voltage spike from layout inductance alone — enough to cause gate ringing and potentially false turn-on.
Rules for gate drive layout:
- Place the gate driver IC as close to the MOSFET as physically possible — within 1–2cm
- Route gate and source return traces as a tightly coupled pair (adjacent or with ground plane between them)
- Use short, wide (≥0.5mm) gate traces — minimizes both resistance and inductance
- Place gate resistor right at the MOSFET gate pin — not at the driver output
- Place gate-source Zener diode directly at the MOSFET pins
- Never route the gate trace over or near switching node traces
The Power Loop
The power loop (V_supply → Q_high drain → switching node → Q_low → GND → V_supply bypass capacitor → V_supply) must also be minimized. Stray inductance in the power loop causes V_DS overshoot during turn-off:
V_DS_spike = V_supply + L_power × dI/dtFor L_power = 50nH and dI/dt = 5A/50ns = 100MA/s:
V_DS_spike = V_supply + 50×10⁻⁹ × 100×10⁶ = V_supply + 5VOn a 48V system, V_DS peaks at 53V — dangerously close to a 60V MOSFET’s BV_DSS. Minimize power loop inductance by placing the bulk capacitor very close to the drain-source power connections and using thick copper or copper pours for the power traces.
Decoupling Capacitors
Place 100nF ceramic capacitors directly at the gate driver’s VCC and GND pins (within 3mm). These supply the instantaneous current bursts required for gate charging without the inductance of traces back to the bulk supply. Add 10µF electrolytic nearby for bulk charge.
For the bootstrap supply, place C_boot between the gate driver’s VB and VS pins — again, within 3mm of the IC pins.
Complete Design Example: 100kHz Buck Converter Gate Drive
Application: Step-down (buck) converter, V_in = 24V, V_out = 5V, I_out = 3A, f = 100kHz.
MOSFET selection: IRLZ44N (logic-level, V_th = 1–2V, R_DS(on) = 22mΩ at 5V, Q_g = 63nC at 10V drive)
Gate driver selection: TC4429 (non-inverting, 6A peak, supply 12V)
Gate drive supply: 12V from an auxiliary winding or pre-regulator
Gate resistor selection:
Maximum acceptable switching time (to limit switching losses to < 500mW):
P_sw = 0.5 × V_in × I_out × t_sw × f_sw × 2 (rise and fall)
500mW = 0.5 × 24 × 3 × t_sw × 100,000 × 2
t_sw = 500mW / (0.5 × 24 × 3 × 200,000) = 500mW / (7,200,000) = 69nsRequired gate drive current for 69ns transition through Miller plateau:
Q_gd(IRLZ44N at 24V) ≈ 22nC (from datasheet)
I_required = Q_gd / t_sw = 22×10⁻⁹ / 69×10⁻⁹ = 319mAGate resistor:
R_g = (V_drive − V_plateau) / I_required = (12 − 4) / 0.319 = 25Ω → use 22ΩVerify switching losses:
t_actual = 22nC / ((12−4)/22Ω) = 22nC / 364mA = 60ns
P_sw = 0.5 × 24 × 3 × 60×10⁻⁹ × 100,000 × 2 = 432mW ✓ (< 500mW target)Verify gate drive power:
P_gate = Q_g × V_drive × f = 63×10⁻⁹ × 12 × 100,000 = 75.6mWTC4429 can handle this. Its maximum supply current is typically 1A continuous — well within rating.
Conduction losses:
Duty cycle D = V_out/V_in = 5/24 = 0.208
P_cond = I²_out × R_DS(on)(hot) × D
R_DS(on) at ~80°C ≈ 22mΩ × 2 = 44mΩ (temperature derating)
P_cond = 9 × 0.044 × 0.208 = 82mWTotal MOSFET losses: 432mW (switching) + 82mW (conduction) = 514mW
With TO-220 MOSFET on small heatsink (θ_total = 15°C/W), junction temperature:
T_j = 25 + 514mW × 15 = 25 + 7.7 = 32.7°C — excellent, no heatsink issuesSummary
MOSFET gate drive is far more than simply applying a voltage to the gate pin. The gate is a capacitive structure that requires sufficient current to charge through the Miller plateau — the dominant switching phase — and sufficient negative drive (or at least solid zero volts) during the off-state to prevent dV/dt-induced false turn-on.
The gate charge curve reveals three distinct phases: Q_gs (channel formation), Q_gd (Miller plateau, where V_DS transitions — the critical phase for switching speed), and final enhancement. The Miller plateau consumes the most charge and sets the switching transition time: t_sw = Q_gd / I_gate, directly impacting switching losses.
Microcontroller GPIO pins are adequate for small MOSFETs (Q_g < 10nC) at low frequencies (< 50kHz). For power MOSFETs in switching converters and motor drives, dedicated gate driver ICs (TC4420, IR2104, IR2110) provide the 0.5–9A peak current needed for fast, reliable switching.
Bootstrap circuits provide the above-rail gate voltage needed for high-side N-channel MOSFETs without requiring an isolated supply. They recharge through the bootstrap diode during the low-side on-time and must be sized to supply Q_g plus leakage current without excessive voltage droop. Their 90–95% maximum duty cycle limit constrains their use.
Deadtime in half-bridge circuits prevents shoot-through by ensuring both switches are fully off during transitions. Minimum deadtime must exceed the slowest switch’s turn-off time with margin. PCB layout — tight gate drive loops, gate driver placement near the MOSFET, and power loop minimization — determines whether calculations translate to reality.