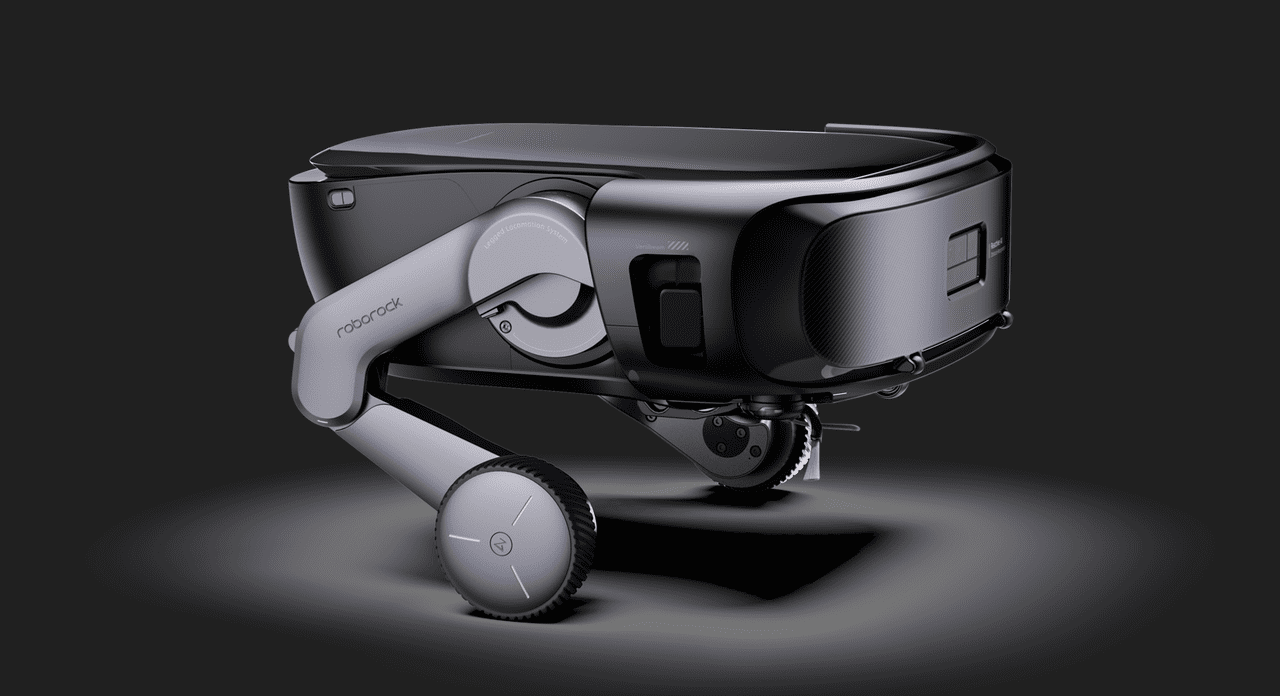
The robot vacuum market, already crowded with incremental improvements, received a genuinely surprising innovation at CES 2026 when Chinese manufacturer Roborock demonstrated a robot vacuum cleaner capable of walking up and down stairs using extendable articulated legs. The Saros Rover, still classified as a development prototype, represents a fundamentally different approach to solving one of the persistent limitations of robotic floor cleaners.
Traditional robot vacuums have been confined to single floors, requiring users to either purchase multiple units or manually transport the device between levels. Some manufacturers have developed docking stations on multiple floors, but the fundamental limitation remained: robot vacuums could not navigate stairs. Roborock’s solution transforms the vacuum into something resembling a mechanical chicken, with legs that unfold from the device’s body to climb steps while continuing to clean each surface as it ascends or descends.
During demonstrations at CES, the Saros Rover moved deliberately up a staircase, extending its legs to reach from one step to the next in a manner that appeared almost biological. The pace was measured rather than rapid, reflecting the complex balance and motion planning required to safely traverse stairs while maintaining enough stability to operate cleaning functions. Roborock representatives indicated that the vacuum can navigate various stairwell configurations including spiral staircases, though some geometric constraints apply.
The engineering challenge of creating a consumer device capable of stair climbing extends far beyond simply adding motorized legs. The system must accurately perceive the dimensions and positions of steps, plan stable foot placements, manage weight distribution throughout the climbing motion, and do all of this while housing cleaning mechanisms, battery packs, dust collection systems, and navigation sensors in a package small enough to be practical for home use.
Roborock did not disclose the specific sensor systems enabling stair perception and navigation, though the capability likely requires a combination of cameras, depth sensors, and possibly lidar to build three-dimensional maps of staircases. The computational requirements for real-time motion planning during stair climbing add another layer of complexity, requiring more processing power than traditional floor-based navigation.
The cleaning effectiveness while climbing stairs represents another technical hurdle. Maintaining proper brush contact and suction performance while the vacuum is oriented at angles or transferring weight between legs requires careful engineering of the cleaning subsystems. Roborock demonstrated the Rover actively cleaning step surfaces as it climbed, though whether this matches the thoroughness of dedicated stair cleaning tools remains to be seen.
Battery life becomes a critical consideration for a device that must power not only traditional vacuum functions but also sophisticated leg mechanisms and the additional computing required for stair navigation. Climbing stairs demands significantly more energy than rolling across flat surfaces, potentially limiting the number of floors the Rover can clean on a single charge. Roborock has not released specific battery capacity or runtime specifications.
The company also faces the challenge of ensuring safety during stair operations. A falling robot vacuum could damage property or injure people or pets, necessitating robust failure modes and detection systems that can identify when conditions make stair climbing unsafe. The development prototype likely includes numerous safety features that will require extensive real-world testing before commercial release.
Roborock provided no timeline for bringing the Saros Rover to market, nor any indication of expected pricing. The complexity of the mechanical and software systems suggests the device will command a significant premium over traditional robot vacuums, which already range from several hundred to over a thousand dollars for high-end models. The development status indicates the company is still refining the technology and gathering feedback before committing to commercial production.
The broader implications of successful stair-climbing capability could extend beyond vacuums. Delivery robots, security patrol robots, and other mobile autonomous devices currently face similar limitations in multi-level environments. Technology developed for the Saros Rover could find applications across multiple robotic domains, particularly as demographics shift toward aging populations that could benefit from robots capable of navigating entire homes.
Whether consumers will embrace a walking vacuum cleaner remains uncertain. The device challenges conventional expectations of how household appliances should appear and function, potentially creating acceptance barriers despite obvious practical benefits. The relatively slow climbing speed observed in demonstrations could also test user patience if transitioning between floors requires several minutes.
For the robotics industry, the Saros Rover represents continued experimentation with mobility solutions beyond simple wheeled platforms. As robots attempt to operate in environments designed for human bodies, the ability to navigate stairs, steps, and other vertical features becomes increasingly important. Roborock’s demonstration suggests that commercially viable solutions to these challenges may be closer than previously thought, even if widespread adoption remains years away.